This project was initially developed as coursework for Artificial Intelligence for Robotics @ Georgia Tech
It is an algorithm that uses measurements observed over time to estimate unknown variables. Kalman Filter is typically used for determining the precise location of vehicles.
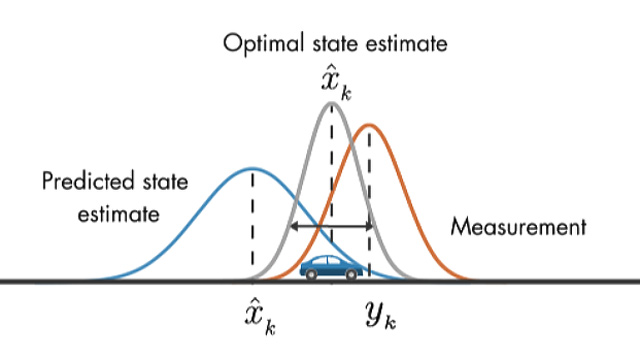
Kalman Filters can be boiled down to two main steps: Update step and prediction step.
In this step the system should retrieve some measurement via a sensor (e.g. GPS). The Algorithm considers prior knowledge of state and the noise/error the sensors may display. These values are used to build a Gaussian distribution that implies the belief on the system location.
The system state may indicate that the system state should change in some way, which changes the state belief provided by the Gaussian. This prediction also has a degree of uncertainty, which is considered to update the location belief. This is known as posterior state estimate
The system variables are further indicated:
- x = initial state (e.g. location and velocity)
- P = initial uncertainty (how certain you are about each value of your state)
- u = external motion (could be a effective motion or something that changes the system state)
- F = next state function (prediction based on )
- H = measurement function (sensors)
- R = measurement uncertainty (sensor error/noise)