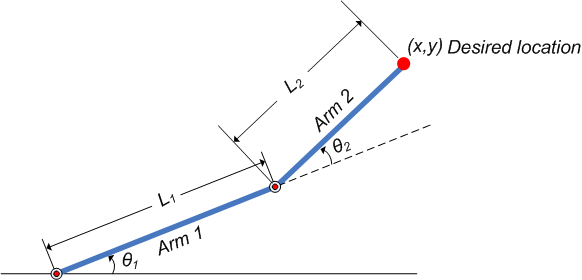
Kinematics is the science of motion. In a two-joint robotic arm, given the angles of the joints, the kinematics equations give the location of the tip of the arm. Inverse kinematics refers to the reverse process.
geanceretta / 2dof-arm Goto Github PK
View Code? Open in Web Editor NEWThis project forked from jefersonjlima/2dof-arm