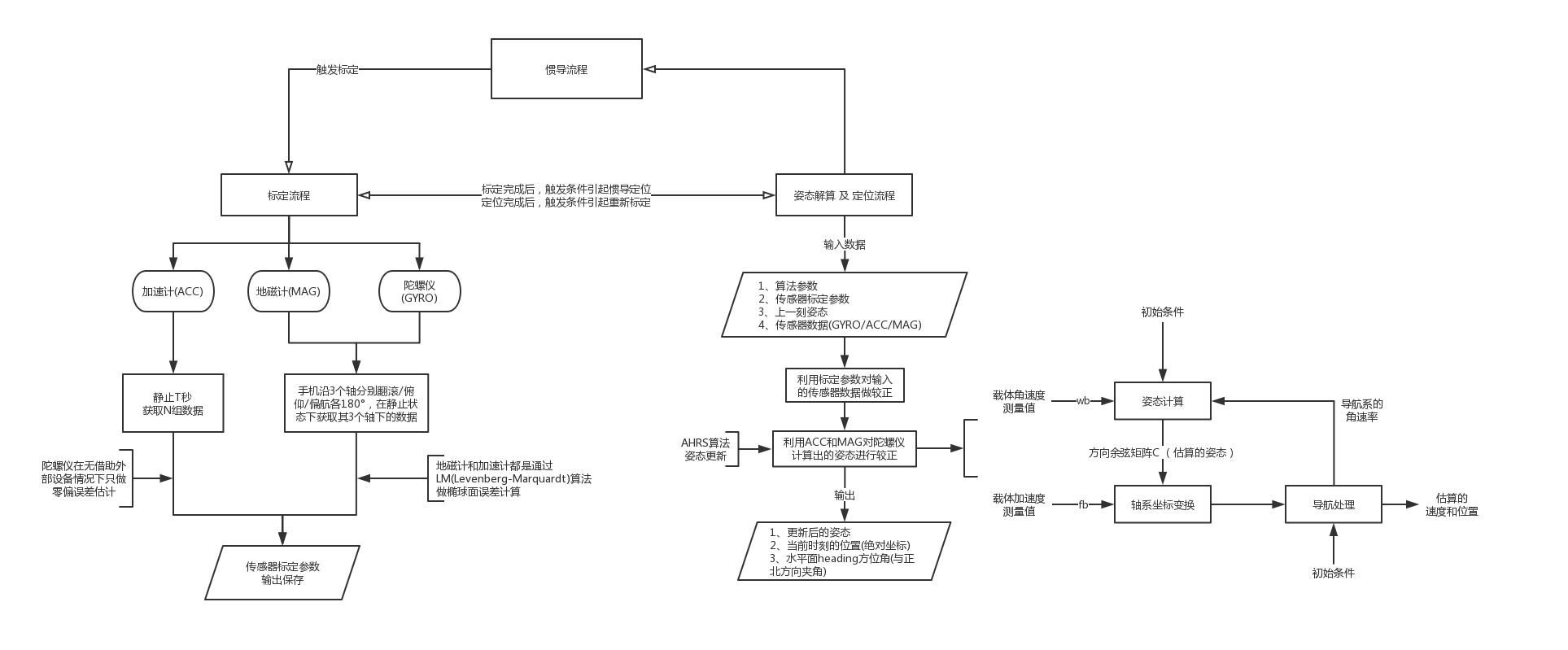
定位是驾驶导航过程中是最基础的一步,也是十分关键的一步,一个准确的定位可以有效提高绑路的精度,也能更加精准感知驾驶形态的变化,由于本项目主要基于手机做导航定位,目前采用的是手机内置的传感器数据(陀螺仪,加速计,地磁计)以及GPS数据融合定位。
手机传感器数据如下:

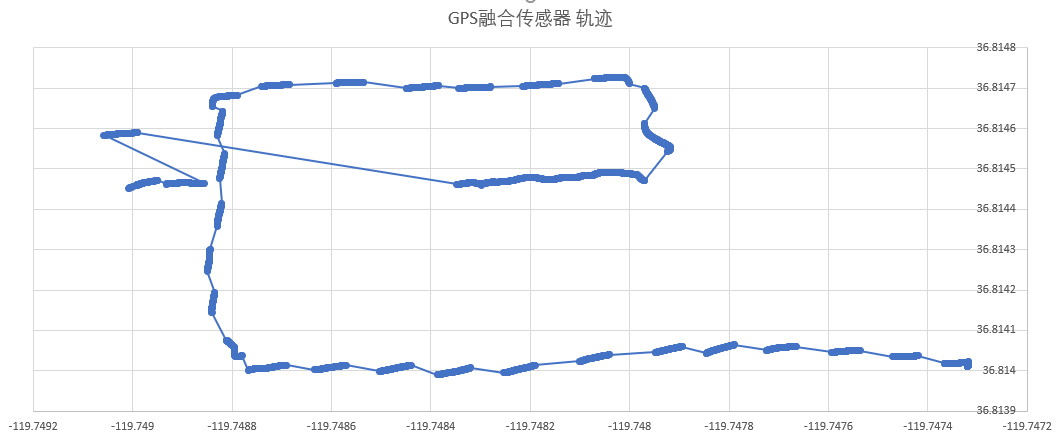
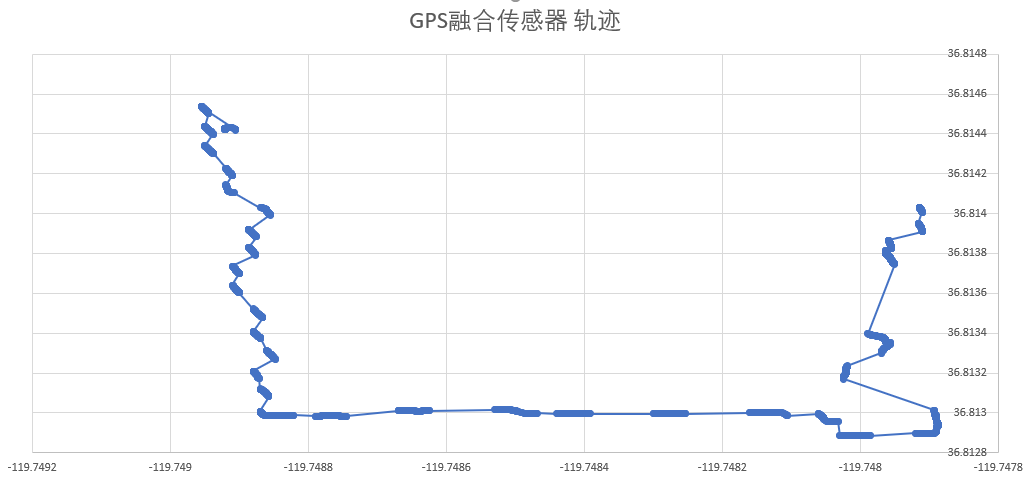
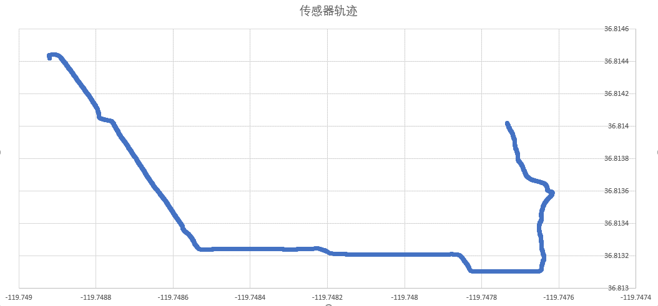
- 融合
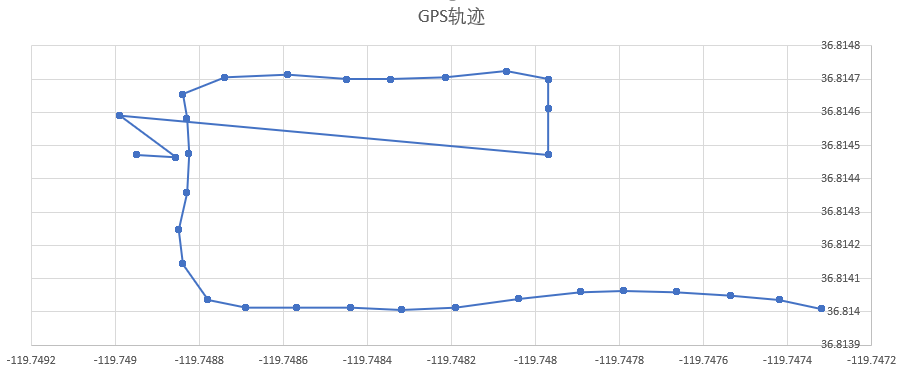
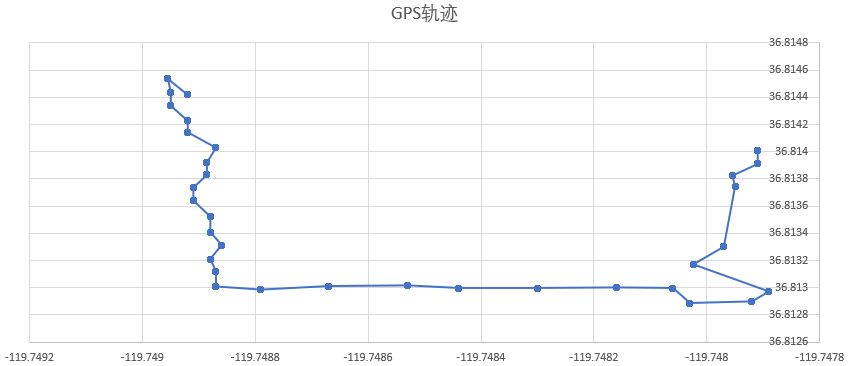
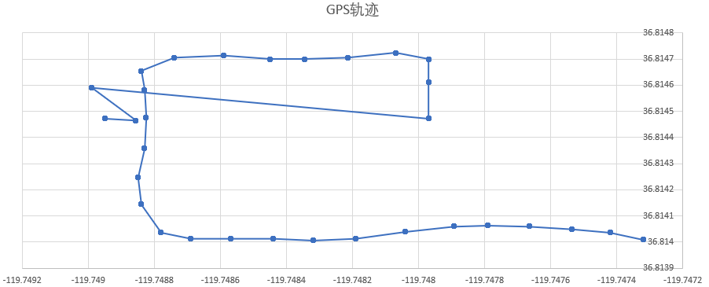
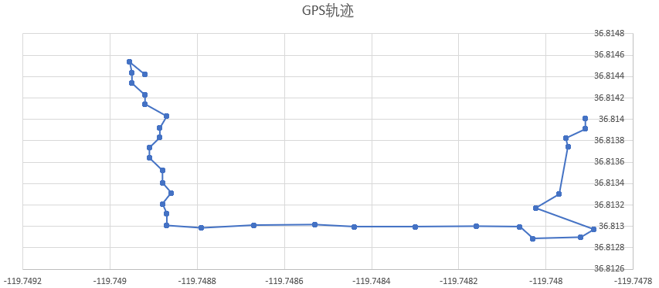
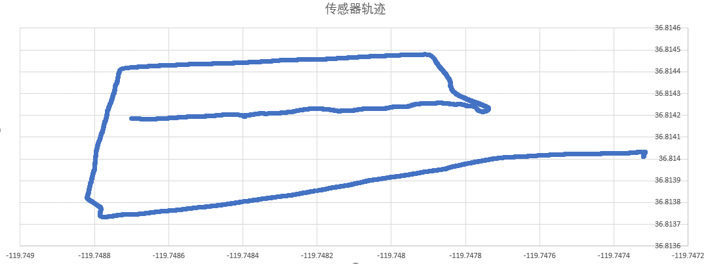
- 未融合
- 《惯性导航》秦永元
- 《捷联惯性导航技术(第2版 译本)》译者:张天光/王秀萍/王丽霞 作者:DavidH.Titte
- An efficient orientation filter for inertial and inertial/magnetic sensor arrays
- Estimation of IMU and MARG orientation using a gradient descent algorithm
- Direction Cosine Matrix IMU Theory
- METHODS FOR NON-LINEAR LEAST SQUARES PROBLEMS
- A Calibration Algorithm for Microelectromechanical Systems Accelerometers in Inertial Navigation Sensors
- A Calibration Method of Three-axis Magnetic Sensor Based on Ellipsoid Fitting
- Accuracy Improvement of Low Cost INS/GPS for Land Applications
- Trajectory preprocessing: Computing with Spatial Trajectories
