经过今天的学习,相信大家对图像翻译、风格迁移有了一定的了解啦,是不是也想自己动手来实现下呢?
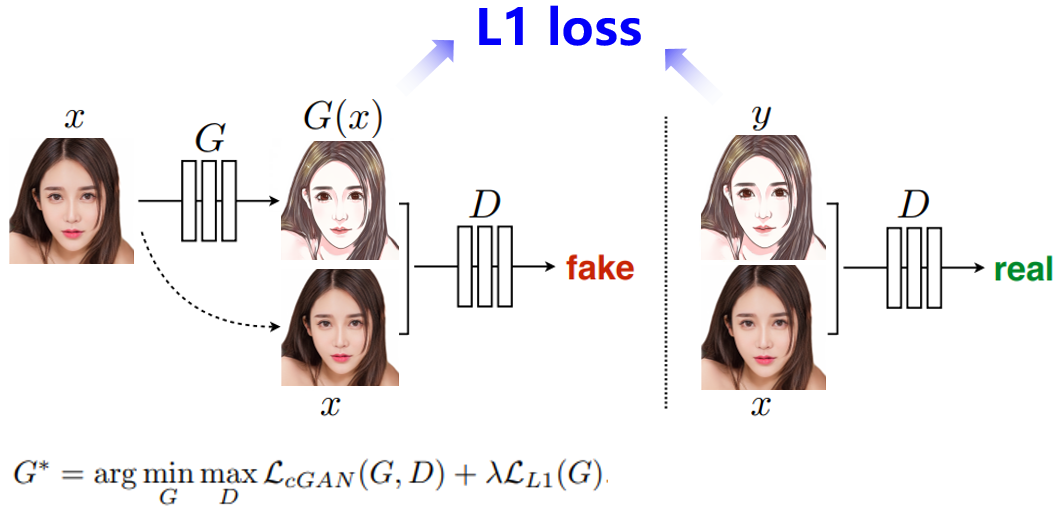
那么,为了满足大家动手实践的愿望,同时为了巩固大家学到的知识,我们Day 3的作业便是带大家完成一遍课程讲解过的应用--Pixel2Pixel:人像卡通化
在本次作业中,大家需要做的是:补齐代码,跑通训练,提交一张卡通化的成品图,动手完成自己的第一个人像卡通化的应用~
import paddle
import paddle.nn as nn
from paddle.io import Dataset, DataLoader
import os
import cv2
import numpy as np
from tqdm import tqdm
import matplotlib.pyplot as plt
%matplotlib inline/opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/matplotlib/__init__.py:107: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop working
from collections import MutableMapping
/opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/matplotlib/rcsetup.py:20: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop working
from collections import Iterable, Mapping
/opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/matplotlib/colors.py:53: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop working
from collections import Sized
- 真人数据来自seeprettyface。
- 数据预处理(详情见photo2cartoon项目)。
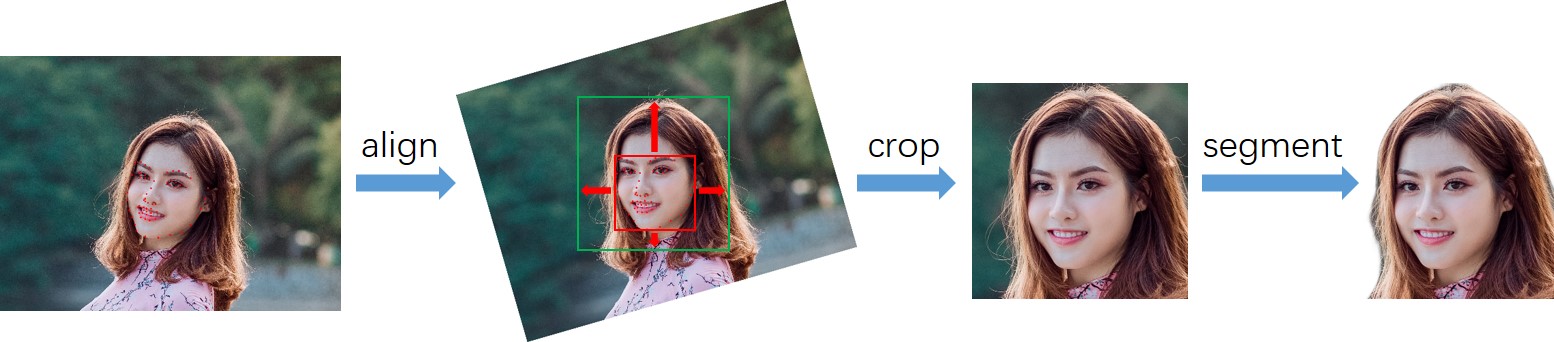
- 使用photo2cartoon项目生成真人数据对应的卡通数据。
# 解压数据
!unzip -qao data/data79149/cartoon_A2B.zip -d data/# 训练数据统计
train_names = os.listdir('data/cartoon_A2B/train')
print(f'训练集数据量: {len(train_names)}')
# 测试数据统计
test_names = os.listdir('data/cartoon_A2B/test')
print(f'测试集数据量: {len(test_names)}')
# 训练数据可视化
imgs = []
for img_name in np.random.choice(train_names, 3, replace=False):
imgs.append(cv2.imread('data/cartoon_A2B/train/'+img_name))
img_show = np.vstack(imgs)[:,:,::-1]
plt.figure(figsize=(10, 10))
plt.imshow(img_show)
plt.show()训练集数据量: 1361
测试集数据量: 100
/opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/matplotlib/cbook/__init__.py:2349: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop working
if isinstance(obj, collections.Iterator):
/opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/matplotlib/cbook/__init__.py:2366: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop working
return list(data) if isinstance(data, collections.MappingView) else data

class PairedData(Dataset):
def __init__(self, phase):
super(PairedData, self).__init__()
self.img_path_list = self.load_A2B_data(phase) # 获取数据列表
self.num_samples = len(self.img_path_list) # 数据量
def __getitem__(self, idx):
img_A2B = cv2.imread(self.img_path_list[idx]) # 读取一组数据
img_A2B = img_A2B.astype('float32') / 127.5 - 1. # 从0~255归一化至-1~1
img_A2B = img_A2B.transpose(2, 0, 1) # 维度变换HWC -> CHW
img_A = img_A2B[..., :256] # 真人照
img_B = img_A2B[..., 256:] # 卡通图
return img_A, img_B
def __len__(self):
return self.num_samples
@staticmethod
def load_A2B_data(phase):
assert phase in ['train', 'test'], "phase should be set within ['train', 'test']"
# 读取数据集,数据中每张图像包含照片和对应的卡通画。
data_path = 'data/cartoon_A2B/'+phase
return [os.path.join(data_path, x) for x in os.listdir(data_path)]paired_dataset_train = PairedData('train')
paired_dataset_test = PairedData('test')class UnetGenerator(nn.Layer):
def __init__(self, input_nc=3, output_nc=3, ngf=64):
super(UnetGenerator, self).__init__()
self.down1 = nn.Conv2D(input_nc, ngf, kernel_size=4, stride=2, padding=1)
self.down2 = Downsample(ngf, ngf*2)
self.down3 = Downsample(ngf*2, ngf*4)
self.down4 = Downsample(ngf*4, ngf*8)
self.down5 = Downsample(ngf*8, ngf*8)
self.down6 = Downsample(ngf*8, ngf*8)
self.down7 = Downsample(ngf*8, ngf*8)
self.center = Downsample(ngf*8, ngf*8)
self.up7 = Upsample(ngf*8, ngf*8, use_dropout=True)
self.up6 = Upsample(ngf*8*2, ngf*8, use_dropout=True)
self.up5 = Upsample(ngf*8*2, ngf*8, use_dropout=True)
self.up4 = Upsample(ngf*8*2, ngf*8)
self.up3 = Upsample(ngf*8*2, ngf*4)
self.up2 = Upsample(ngf*4*2, ngf*2)
self.up1 = Upsample(ngf*2*2, ngf)
self.output_block = nn.Sequential(
nn.ReLU(),
nn.Conv2DTranspose(ngf*2, output_nc, kernel_size=4, stride=2, padding=1),
nn.Tanh()
)
def forward(self, x):
d1 = self.down1(x)
d2 = self.down2(d1)
d3 = self.down3(d2)
d4 = self.down4(d3)
d5 = self.down5(d4)
d6 = self.down6(d5)
d7 = self.down7(d6)
c = self.center(d7)
x = self.up7(c, d7)
x = self.up6(x, d6)
x = self.up5(x, d5)
x = self.up4(x, d4)
x = self.up3(x, d3)
x = self.up2(x, d2)
x = self.up1(x, d1)
x = self.output_block(x)
return x
class Downsample(nn.Layer):
# LeakyReLU => conv => batch norm
def __init__(self, in_dim, out_dim, kernel_size=4, stride=2, padding=1):
super(Downsample, self).__init__()
self.layers = nn.Sequential(
nn.LeakyReLU(0.2), # LeakyReLU, leaky=0.2
nn.Conv2D(in_dim, out_dim, kernel_size, stride, padding, bias_attr=False), # Conv2D
nn.BatchNorm2D(out_dim)
)
def forward(self, x):
x = self.layers(x)
return x
class Upsample(nn.Layer):
# ReLU => deconv => batch norm => dropout
def __init__(self, in_dim, out_dim, kernel_size=4, stride=2, padding=1, use_dropout=False):
super(Upsample, self).__init__()
sequence = [
nn.ReLU(), # ReLU
nn.Conv2DTranspose(in_dim, out_dim, kernel_size, stride, padding, bias_attr=False), # Conv2DTranspose
nn.BatchNorm2D(out_dim)
]
if use_dropout:
sequence.append(nn.Dropout(p=0.5))
self.layers = nn.Sequential(*sequence)
def forward(self, x, skip):
x = self.layers(x)
x = paddle.concat([x, skip], axis=1)
return xclass NLayerDiscriminator(nn.Layer):
def __init__(self, input_nc=6, ndf=64):
super(NLayerDiscriminator, self).__init__()
self.layers = nn.Sequential(
nn.Conv2D(input_nc, ndf, kernel_size=4, stride=2, padding=1),
nn.LeakyReLU(0.2),
ConvBlock(ndf, ndf*2),
ConvBlock(ndf*2, ndf*4),
ConvBlock(ndf*4, ndf*8, stride=1),
nn.Conv2D(ndf*8, 1, kernel_size=4, stride=1, padding=1),
nn.Sigmoid()
)
def forward(self, input):
return self.layers(input)
class ConvBlock(nn.Layer):
# conv => batch norm => LeakyReLU
def __init__(self, in_dim, out_dim, kernel_size=4, stride=2, padding=1):
super(ConvBlock, self).__init__()
self.layers = nn.Sequential(
nn.Conv2D(in_dim, out_dim, kernel_size, stride, padding, bias_attr=False), # Conv2D
nn.BatchNorm2D(out_dim), # BatchNorm2D
nn.LeakyReLU(0.2)
)
def forward(self, x):
x = self.layers(x)
return xgenerator = UnetGenerator()
discriminator = NLayerDiscriminator()out = generator(paddle.ones([1, 3, 256, 256]))
print('生成器输出尺寸:', out.shape) # 应为[1, 3, 256, 256]
out = discriminator(paddle.ones([1, 6, 256, 256]))
print('鉴别器输出尺寸:', out.shape) # 应为[1, 1, 30, 30]生成器输出尺寸: [1, 3, 256, 256]
鉴别器输出尺寸: [1, 1, 30, 30]
/opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/paddle/nn/layer/norm.py:648: UserWarning: When training, we now always track global mean and variance.
"When training, we now always track global mean and variance.")
# 超参数
LR = 1e-4
BATCH_SIZE = 8
EPOCHS = 100
# 优化器
optimizerG = paddle.optimizer.Adam(
learning_rate=LR,
parameters=generator.parameters(),
beta1=0.5,
beta2=0.999)
optimizerD = paddle.optimizer.Adam(
learning_rate=LR,
parameters=discriminator.parameters(),
beta1=0.5,
beta2=0.999)
# 损失函数
bce_loss = nn.BCELoss()
l1_loss = nn.L1Loss()
# dataloader
data_loader_train = DataLoader(
paired_dataset_train,
batch_size=BATCH_SIZE,
shuffle=True,
drop_last=True
)
data_loader_test = DataLoader(
paired_dataset_test,
batch_size=BATCH_SIZE
)results_save_path = 'work/results'
os.makedirs(results_save_path, exist_ok=True) # 保存每个epoch的测试结果
weights_save_path = 'work/weights'
os.makedirs(weights_save_path, exist_ok=True) # 保存模型
for epoch in range(EPOCHS):
for data in tqdm(data_loader_train):
real_A, real_B = data
optimizerD.clear_grad()
# D([real_A, real_B])
real_AB = paddle.concat((real_A, real_B), 1)
d_real_predict = discriminator(real_AB)
d_real_loss = bce_loss(d_real_predict, paddle.ones_like(d_real_predict))
# D([real_A, fake_B])
fake_B = generator(real_A).detach()
fake_AB = paddle.concat((real_A, fake_B), 1)
d_fake_predict = discriminator(fake_AB)
d_fake_loss = bce_loss(d_fake_predict, paddle.zeros_like(d_fake_predict))
# train D
d_loss = (d_real_loss + d_fake_loss) / 2.
d_loss.backward()
optimizerD.step()
optimizerG.clear_grad()
# D([real_A, fake_B])
fake_B = generator(real_A)
fake_AB = paddle.concat((real_A, fake_B), 1)
g_fake_predict = discriminator(fake_AB)
g_bce_loss = bce_loss(g_fake_predict, paddle.ones_like(g_fake_predict))
g_l1_loss = l1_loss(fake_B, real_B) * 100.
g_loss = g_bce_loss + g_l1_loss * 1.
# train G
g_loss.backward()
optimizerG.step()
print(f'Epoch [{epoch+1}/{EPOCHS}] Loss D: {d_loss.numpy()}, Loss G: {g_loss.numpy()}')
if (epoch+1) % 10 == 0:
paddle.save(generator.state_dict(), os.path.join(weights_save_path, 'epoch'+str(epoch+1).zfill(3)+'.pdparams'))
# test
generator.eval()
with paddle.no_grad():
for data in data_loader_test:
real_A, real_B = data
break
fake_B = generator(real_A)
result = paddle.concat([real_A[:3], real_B[:3], fake_B[:3]], 3)
result = result.detach().numpy().transpose(0, 2, 3, 1)
result = np.vstack(result)
result = (result * 127.5 + 127.5).astype(np.uint8)
cv2.imwrite(os.path.join(results_save_path, 'epoch'+str(epoch+1).zfill(3)+'.png'), result)
generator.train()100%|██████████| 170/170 [00:23<00:00, 7.22it/s]
1%| | 1/170 [00:00<00:24, 6.87it/s]
Epoch [1/100] Loss D: [0.5284234], Loss G: [13.064737]
100%|██████████| 170/170 [00:23<00:00, 7.29it/s]
1%| | 1/170 [00:00<00:25, 6.64it/s]
Epoch [2/100] Loss D: [0.54123324], Loss G: [11.698286]
100%|██████████| 170/170 [00:23<00:00, 7.29it/s]
1%| | 1/170 [00:00<00:24, 6.78it/s]
Epoch [3/100] Loss D: [0.5299478], Loss G: [11.66753]
100%|██████████| 170/170 [00:23<00:00, 7.28it/s]
1%| | 1/170 [00:00<00:24, 6.85it/s]
Epoch [4/100] Loss D: [0.6474249], Loss G: [11.17137]
1%| | 2/170 [00:00<00:24, 6.96it/s]100%|██████████| 170/170 [00:23<00:00, 7.27it/s]
1%| | 1/170 [00:00<00:24, 6.86it/s]
Epoch [5/100] Loss D: [0.6039876], Loss G: [11.128557]
1%| | 2/170 [00:00<00:24, 6.97it/s]100%|██████████| 170/170 [00:23<00:00, 7.28it/s]
1%| | 1/170 [00:00<00:24, 6.80it/s]
Epoch [6/100] Loss D: [0.5950774], Loss G: [10.30802]
1%| | 2/170 [00:00<00:24, 6.91it/s]100%|██████████| 170/170 [00:23<00:00, 7.27it/s]
1%| | 1/170 [00:00<00:24, 6.78it/s]
Epoch [7/100] Loss D: [0.6796185], Loss G: [10.197595]
1%| | 2/170 [00:00<00:24, 6.90it/s]100%|██████████| 170/170 [00:23<00:00, 7.24it/s]
1%| | 1/170 [00:00<00:24, 6.78it/s]
Epoch [8/100] Loss D: [0.6318821], Loss G: [10.000329]
1%| | 2/170 [00:00<00:24, 6.91it/s]100%|██████████| 170/170 [00:23<00:00, 7.27it/s]
1%| | 1/170 [00:00<00:25, 6.72it/s]
Epoch [9/100] Loss D: [0.5950939], Loss G: [9.717655]
100%|██████████| 170/170 [00:23<00:00, 7.24it/s]
Epoch [10/100] Loss D: [0.5593741], Loss G: [9.465918]
100%|██████████| 170/170 [00:23<00:00, 7.26it/s]
1%| | 1/170 [00:00<00:24, 6.87it/s]
Epoch [11/100] Loss D: [0.54420507], Loss G: [8.719758]
100%|██████████| 170/170 [00:23<00:00, 7.27it/s]
1%| | 1/170 [00:00<00:25, 6.73it/s]
Epoch [12/100] Loss D: [0.6362987], Loss G: [8.977068]
100%|██████████| 170/170 [00:23<00:00, 7.27it/s]
1%| | 1/170 [00:00<00:24, 6.88it/s]
Epoch [13/100] Loss D: [0.6640139], Loss G: [9.174168]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:25, 6.73it/s]
Epoch [14/100] Loss D: [0.6028167], Loss G: [9.190138]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.90it/s]
Epoch [15/100] Loss D: [0.67779934], Loss G: [8.241856]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.82it/s]
Epoch [16/100] Loss D: [0.69265723], Loss G: [8.520813]
100%|██████████| 170/170 [00:23<00:00, 7.27it/s]
1%| | 1/170 [00:00<00:25, 6.74it/s]
Epoch [17/100] Loss D: [0.5550152], Loss G: [8.240015]
1%| | 2/170 [00:00<00:24, 6.88it/s]100%|██████████| 170/170 [00:23<00:00, 7.24it/s]
1%| | 1/170 [00:00<00:24, 6.83it/s]
Epoch [18/100] Loss D: [0.7933258], Loss G: [7.9467487]
1%| | 2/170 [00:00<00:24, 6.95it/s]100%|██████████| 170/170 [00:23<00:00, 7.29it/s]
1%| | 1/170 [00:00<00:24, 6.86it/s]
Epoch [19/100] Loss D: [0.6194705], Loss G: [8.075335]
1%| | 2/170 [00:00<00:24, 6.98it/s]100%|██████████| 170/170 [00:23<00:00, 7.28it/s]
Epoch [20/100] Loss D: [0.66503227], Loss G: [7.8089933]
100%|██████████| 170/170 [00:23<00:00, 7.29it/s]
1%| | 1/170 [00:00<00:24, 6.85it/s]
Epoch [21/100] Loss D: [0.67030644], Loss G: [7.367738]
1%| | 2/170 [00:00<00:24, 6.99it/s]100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.80it/s]
Epoch [22/100] Loss D: [0.631791], Loss G: [7.708729]
100%|██████████| 170/170 [00:23<00:00, 7.29it/s]
1%| | 1/170 [00:00<00:25, 6.55it/s]
Epoch [23/100] Loss D: [0.6423906], Loss G: [7.2092514]
1%| | 2/170 [00:00<00:24, 6.73it/s]100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.90it/s]
Epoch [24/100] Loss D: [0.6739343], Loss G: [7.237084]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.88it/s]
Epoch [25/100] Loss D: [0.66729414], Loss G: [6.767889]
100%|██████████| 170/170 [00:23<00:00, 7.29it/s]
1%| | 1/170 [00:00<00:24, 6.82it/s]
Epoch [26/100] Loss D: [0.61588544], Loss G: [6.787832]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.89it/s]
Epoch [27/100] Loss D: [0.6792059], Loss G: [6.9433084]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.88it/s]
Epoch [28/100] Loss D: [0.72314185], Loss G: [6.8468137]
100%|██████████| 170/170 [00:23<00:00, 7.28it/s]
1%| | 1/170 [00:00<00:24, 6.91it/s]
Epoch [29/100] Loss D: [0.65756834], Loss G: [6.8010254]
1%| | 2/170 [00:00<00:23, 7.01it/s]100%|██████████| 170/170 [00:23<00:00, 7.29it/s]
Epoch [30/100] Loss D: [0.6856936], Loss G: [6.6264324]
100%|██████████| 170/170 [00:23<00:00, 7.29it/s]
1%| | 1/170 [00:00<00:24, 6.86it/s]
Epoch [31/100] Loss D: [0.71327627], Loss G: [6.605694]
100%|██████████| 170/170 [00:23<00:00, 7.31it/s]
1%| | 1/170 [00:00<00:25, 6.76it/s]
Epoch [32/100] Loss D: [0.6019069], Loss G: [6.340989]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.85it/s]
Epoch [33/100] Loss D: [0.6134093], Loss G: [6.2769694]
1%| | 2/170 [00:00<00:24, 6.94it/s]100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.87it/s]
Epoch [34/100] Loss D: [0.67665935], Loss G: [6.7924075]
1%| | 2/170 [00:00<00:24, 6.98it/s]100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.83it/s]
Epoch [35/100] Loss D: [0.6352638], Loss G: [6.151738]
1%| | 2/170 [00:00<00:24, 6.96it/s]100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.91it/s]
Epoch [36/100] Loss D: [0.7007777], Loss G: [6.3575606]
1%| | 2/170 [00:00<00:23, 7.02it/s]100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.83it/s]
Epoch [37/100] Loss D: [0.69342726], Loss G: [5.850954]
100%|██████████| 170/170 [00:23<00:00, 7.29it/s]
1%| | 1/170 [00:00<00:25, 6.54it/s]
Epoch [38/100] Loss D: [0.7059885], Loss G: [6.045345]
1%| | 2/170 [00:00<00:24, 6.73it/s]100%|██████████| 170/170 [00:23<00:00, 7.29it/s]
1%| | 1/170 [00:00<00:25, 6.71it/s]
Epoch [39/100] Loss D: [0.5827794], Loss G: [5.97258]
1%| | 2/170 [00:00<00:24, 6.86it/s]100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
Epoch [40/100] Loss D: [0.6818665], Loss G: [5.9698906]
100%|██████████| 170/170 [00:23<00:00, 7.28it/s]
1%| | 1/170 [00:00<00:25, 6.54it/s]
Epoch [41/100] Loss D: [0.6436964], Loss G: [5.5804996]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.78it/s]
Epoch [42/100] Loss D: [0.6325854], Loss G: [5.329829]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.82it/s]
Epoch [43/100] Loss D: [0.6460885], Loss G: [5.8121433]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.91it/s]
Epoch [44/100] Loss D: [0.5965668], Loss G: [5.508972]
100%|██████████| 170/170 [00:23<00:00, 7.22it/s]
1%| | 1/170 [00:00<00:24, 6.78it/s]
Epoch [45/100] Loss D: [0.84220695], Loss G: [5.683806]
100%|██████████| 170/170 [00:23<00:00, 7.31it/s]
1%| | 1/170 [00:00<00:24, 6.81it/s]
Epoch [46/100] Loss D: [0.63925695], Loss G: [5.52334]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.82it/s]
Epoch [47/100] Loss D: [0.6487623], Loss G: [5.21964]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.80it/s]
Epoch [48/100] Loss D: [0.6693777], Loss G: [5.29474]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.88it/s]
Epoch [49/100] Loss D: [0.6117195], Loss G: [5.296708]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
Epoch [50/100] Loss D: [0.67985165], Loss G: [5.4502654]
100%|██████████| 170/170 [00:23<00:00, 7.29it/s]
1%| | 1/170 [00:00<00:24, 6.93it/s]
Epoch [51/100] Loss D: [0.64274585], Loss G: [4.8949633]
100%|██████████| 170/170 [00:23<00:00, 7.31it/s]
1%| | 1/170 [00:00<00:24, 6.78it/s]
Epoch [52/100] Loss D: [0.62808985], Loss G: [5.282054]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:27, 6.12it/s]
Epoch [53/100] Loss D: [0.6447178], Loss G: [5.0051484]
1%| | 2/170 [00:00<00:26, 6.43it/s]100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.78it/s]
Epoch [54/100] Loss D: [0.6399511], Loss G: [5.000868]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.83it/s]
Epoch [55/100] Loss D: [0.6100814], Loss G: [5.101789]
1%| | 2/170 [00:00<00:24, 6.95it/s]100%|██████████| 170/170 [00:23<00:00, 7.31it/s]
1%| | 1/170 [00:00<00:24, 6.82it/s]
Epoch [56/100] Loss D: [0.6472188], Loss G: [5.447066]
100%|██████████| 170/170 [00:23<00:00, 7.29it/s]
1%| | 1/170 [00:00<00:24, 6.86it/s]
Epoch [57/100] Loss D: [0.6713679], Loss G: [5.348196]
100%|██████████| 170/170 [00:23<00:00, 7.28it/s]
1%| | 1/170 [00:00<00:24, 6.86it/s]
Epoch [58/100] Loss D: [0.615517], Loss G: [4.9242]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.85it/s]
Epoch [59/100] Loss D: [0.6416937], Loss G: [5.0159454]
1%| | 2/170 [00:00<00:24, 6.95it/s]100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
Epoch [60/100] Loss D: [0.675475], Loss G: [4.7302303]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.85it/s]
Epoch [61/100] Loss D: [0.6496334], Loss G: [4.6984844]
100%|██████████| 170/170 [00:23<00:00, 7.31it/s]
1%| | 1/170 [00:00<00:25, 6.71it/s]
Epoch [62/100] Loss D: [0.6449231], Loss G: [4.8061175]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.77it/s]
Epoch [63/100] Loss D: [0.66442376], Loss G: [5.032484]
1%| | 2/170 [00:00<00:24, 6.92it/s]100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.79it/s]
Epoch [64/100] Loss D: [0.6816081], Loss G: [4.970877]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.77it/s]
Epoch [65/100] Loss D: [0.68846303], Loss G: [5.0442305]
100%|██████████| 170/170 [00:23<00:00, 7.29it/s]
1%| | 1/170 [00:00<00:24, 6.76it/s]
Epoch [66/100] Loss D: [0.6589049], Loss G: [4.9111423]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.77it/s]
Epoch [67/100] Loss D: [0.6767062], Loss G: [5.03377]
1%| | 2/170 [00:00<00:24, 6.91it/s]100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.80it/s]
Epoch [68/100] Loss D: [0.6409887], Loss G: [4.5729055]
1%| | 2/170 [00:00<00:24, 6.94it/s]100%|██████████| 170/170 [00:23<00:00, 7.29it/s]
1%| | 1/170 [00:00<00:25, 6.71it/s]
Epoch [69/100] Loss D: [0.658414], Loss G: [4.670569]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
Epoch [70/100] Loss D: [0.6667415], Loss G: [4.7972655]
100%|██████████| 170/170 [00:23<00:00, 7.27it/s]
1%| | 1/170 [00:00<00:25, 6.71it/s]
Epoch [71/100] Loss D: [0.6540038], Loss G: [4.5085125]
1%| | 2/170 [00:00<00:24, 6.88it/s]100%|██████████| 170/170 [00:23<00:00, 7.29it/s]
1%| | 1/170 [00:00<00:25, 6.75it/s]
Epoch [72/100] Loss D: [0.6422181], Loss G: [4.565335]
1%| | 2/170 [00:00<00:24, 6.91it/s]100%|██████████| 170/170 [00:23<00:00, 7.27it/s]
1%| | 1/170 [00:00<00:24, 6.83it/s]
Epoch [73/100] Loss D: [0.669103], Loss G: [4.978608]
1%| | 2/170 [00:00<00:24, 6.90it/s]100%|██████████| 170/170 [00:23<00:00, 7.29it/s]
1%| | 1/170 [00:00<00:24, 6.82it/s]
Epoch [74/100] Loss D: [0.6967082], Loss G: [4.2552986]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.86it/s]
Epoch [75/100] Loss D: [0.6473232], Loss G: [4.4088635]
100%|██████████| 170/170 [00:23<00:00, 7.26it/s]
1%| | 1/170 [00:00<00:25, 6.76it/s]
Epoch [76/100] Loss D: [0.70706826], Loss G: [4.3607]
100%|██████████| 170/170 [00:23<00:00, 7.27it/s]
1%| | 1/170 [00:00<00:24, 6.82it/s]
Epoch [77/100] Loss D: [0.6994731], Loss G: [4.878913]
100%|██████████| 170/170 [00:23<00:00, 7.28it/s]
1%| | 1/170 [00:00<00:25, 6.62it/s]
Epoch [78/100] Loss D: [0.67322636], Loss G: [4.7822013]
1%| | 2/170 [00:00<00:24, 6.80it/s]100%|██████████| 170/170 [00:23<00:00, 7.27it/s]
1%| | 1/170 [00:00<00:24, 6.88it/s]
Epoch [79/100] Loss D: [0.6506158], Loss G: [4.8017626]
2%|▏ | 3/170 [00:00<00:23, 7.10it/s]100%|██████████| 170/170 [00:23<00:00, 7.28it/s]
Epoch [80/100] Loss D: [0.66648376], Loss G: [4.4588194]
100%|██████████| 170/170 [00:23<00:00, 7.24it/s]
1%| | 1/170 [00:00<00:24, 6.89it/s]
Epoch [81/100] Loss D: [0.6700024], Loss G: [4.300681]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:25, 6.63it/s]
Epoch [82/100] Loss D: [0.6441313], Loss G: [4.6373615]
1%| | 2/170 [00:00<00:24, 6.80it/s]100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:25, 6.70it/s]
Epoch [83/100] Loss D: [0.66145974], Loss G: [4.4312263]
1%| | 2/170 [00:00<00:24, 6.86it/s]100%|██████████| 170/170 [00:23<00:00, 7.28it/s]
1%| | 1/170 [00:00<00:25, 6.70it/s]
Epoch [84/100] Loss D: [0.64504385], Loss G: [4.5682697]
100%|██████████| 170/170 [00:23<00:00, 7.27it/s]
1%| | 1/170 [00:00<00:25, 6.69it/s]
Epoch [85/100] Loss D: [0.78593516], Loss G: [4.906456]
100%|██████████| 170/170 [00:23<00:00, 7.32it/s]
1%| | 1/170 [00:00<00:25, 6.75it/s]
Epoch [86/100] Loss D: [0.6439626], Loss G: [4.36108]
100%|██████████| 170/170 [00:23<00:00, 7.31it/s]
1%| | 1/170 [00:00<00:24, 6.83it/s]
Epoch [87/100] Loss D: [0.65820193], Loss G: [4.0977488]
1%| | 2/170 [00:00<00:24, 6.96it/s]100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
1%| | 1/170 [00:00<00:24, 6.82it/s]
Epoch [88/100] Loss D: [0.65204835], Loss G: [4.3304462]
1%| | 2/170 [00:00<00:24, 6.95it/s]100%|██████████| 170/170 [00:23<00:00, 7.31it/s]
1%| | 1/170 [00:00<00:24, 6.79it/s]
Epoch [89/100] Loss D: [0.6524645], Loss G: [4.3844604]
100%|██████████| 170/170 [00:23<00:00, 7.30it/s]
Epoch [90/100] Loss D: [0.67250204], Loss G: [4.608688]
100%|██████████| 170/170 [00:23<00:00, 7.29it/s]
1%| | 1/170 [00:00<00:24, 6.88it/s]
Epoch [91/100] Loss D: [0.6917672], Loss G: [4.214923]
1%| | 2/170 [00:00<00:23, 7.01it/s]100%|██████████| 170/170 [00:23<00:00, 7.32it/s]
1%| | 1/170 [00:00<00:24, 6.99it/s]
Epoch [92/100] Loss D: [0.63771534], Loss G: [4.2107615]
100%|██████████| 170/170 [00:23<00:00, 7.33it/s]
1%| | 1/170 [00:00<00:24, 6.95it/s]
Epoch [93/100] Loss D: [0.6473569], Loss G: [4.1955166]
100%|██████████| 170/170 [00:23<00:00, 7.29it/s]
1%| | 1/170 [00:00<00:24, 6.90it/s]
Epoch [94/100] Loss D: [0.6381893], Loss G: [4.1456714]
1%| | 2/170 [00:00<00:24, 7.00it/s]100%|██████████| 170/170 [00:23<00:00, 7.29it/s]
1%| | 1/170 [00:00<00:24, 6.92it/s]
Epoch [95/100] Loss D: [0.6624663], Loss G: [3.7003992]
2%|▏ | 4/170 [00:00<00:23, 7.20it/s]100%|██████████| 170/170 [00:23<00:00, 7.29it/s]
1%| | 1/170 [00:00<00:24, 6.94it/s]
Epoch [96/100] Loss D: [0.66718966], Loss G: [4.3378816]
1%| | 2/170 [00:00<00:23, 7.04it/s]100%|██████████| 170/170 [00:23<00:00, 7.28it/s]
1%| | 1/170 [00:00<00:24, 6.88it/s]
Epoch [97/100] Loss D: [0.7393694], Loss G: [4.2994103]
1%| | 2/170 [00:00<00:24, 6.99it/s]100%|██████████| 170/170 [00:23<00:00, 7.29it/s]
1%| | 1/170 [00:00<00:24, 6.90it/s]
Epoch [98/100] Loss D: [0.6694163], Loss G: [4.1130667]
2%|▏ | 3/170 [00:00<00:23, 7.12it/s]100%|██████████| 170/170 [00:23<00:00, 7.32it/s]
1%| | 1/170 [00:00<00:24, 6.88it/s]
Epoch [99/100] Loss D: [0.68636537], Loss G: [4.5008516]
1%| | 2/170 [00:00<00:24, 7.00it/s]100%|██████████| 170/170 [00:23<00:00, 7.28it/s]
Epoch [100/100] Loss D: [0.6598151], Loss G: [4.105522]
# 为生成器加载权重
results_save_path = 'work/results'
weights_save_path = 'work/weights'
last_weights_path = os.path.join(weights_save_path, sorted(os.listdir(weights_save_path))[-1])
print('加载权重:', last_weights_path)
model_state_dict = paddle.load(last_weights_path)
generator.load_dict(model_state_dict)
generator.eval()加载权重: work/weights/epoch100.pdparams
# 读取数据
img_name='data/cartoon_A2B/test/01462.png'
img_A2B = cv2.imread(img_name)
img_A = img_A2B[:, :256] # 真人照
img_B = img_A2B[:, 256:] # 卡通图
g_input = img_A.astype('float32') / 127.5 - 1 # 归一化
g_input = g_input[np.newaxis, ...].transpose(0, 3, 1, 2) # NHWC -> NCHW
g_input = paddle.to_tensor(g_input) # numpy -> tensor
g_output = generator(g_input)
g_output = g_output.detach().numpy() # tensor -> numpy
g_output = g_output.transpose(0, 2, 3, 1)[0] # NCHW -> NHWC
g_output = g_output * 127.5 + 127.5 # 反归一化
g_output = g_output.astype(np.uint8)
img_show = np.hstack([img_A, g_output])[:,:,::-1]
plt.figure(figsize=(8, 8))
plt.imshow(img_show)
plt.show()


