Comments (19)
 MyNameIsCosmo
commented on May 6, 2024
MyNameIsCosmo
commented on May 6, 2024
Try adjusting the values in the Dynamic Reconfigure starting with the filtered cloud and cluster sizes.
Also check the output of the lidar_body_tracking node in your terminal. You may need to pass --screen to the end of your roslaunch command.
from lidar_body_tracking.
 yashspatel09
commented on May 6, 2024
yashspatel09
commented on May 6, 2024
Hey I know I am not helping you much with this info but I am new with ROS and trying to figure out what I am doing wrong. Please guide me through this. This image shows 2 files that needs frame id change and 2 terminals with roslaunch and rostopic. For some reasone QP308 is still displaying and there is still no data in filtered or clustered nodes.

Can you please walk me through this. I would be really thankful
from lidar_body_tracking.
MyNameIsCosmo
commented on May 6, 2024
In the lidar_body_tracking.launch (top-left) try changing scan_topic to /QP308/pc_QP308
/QP308/pc_QP308 is the Point Cloud topic published by the Quanergy Lidar driver.
Welcome to ROS!
from lidar_body_tracking.
yashspatel09
commented on May 6, 2024
Yup in my case it is Sensor/points
from lidar_body_tracking.
MyNameIsCosmo
commented on May 6, 2024
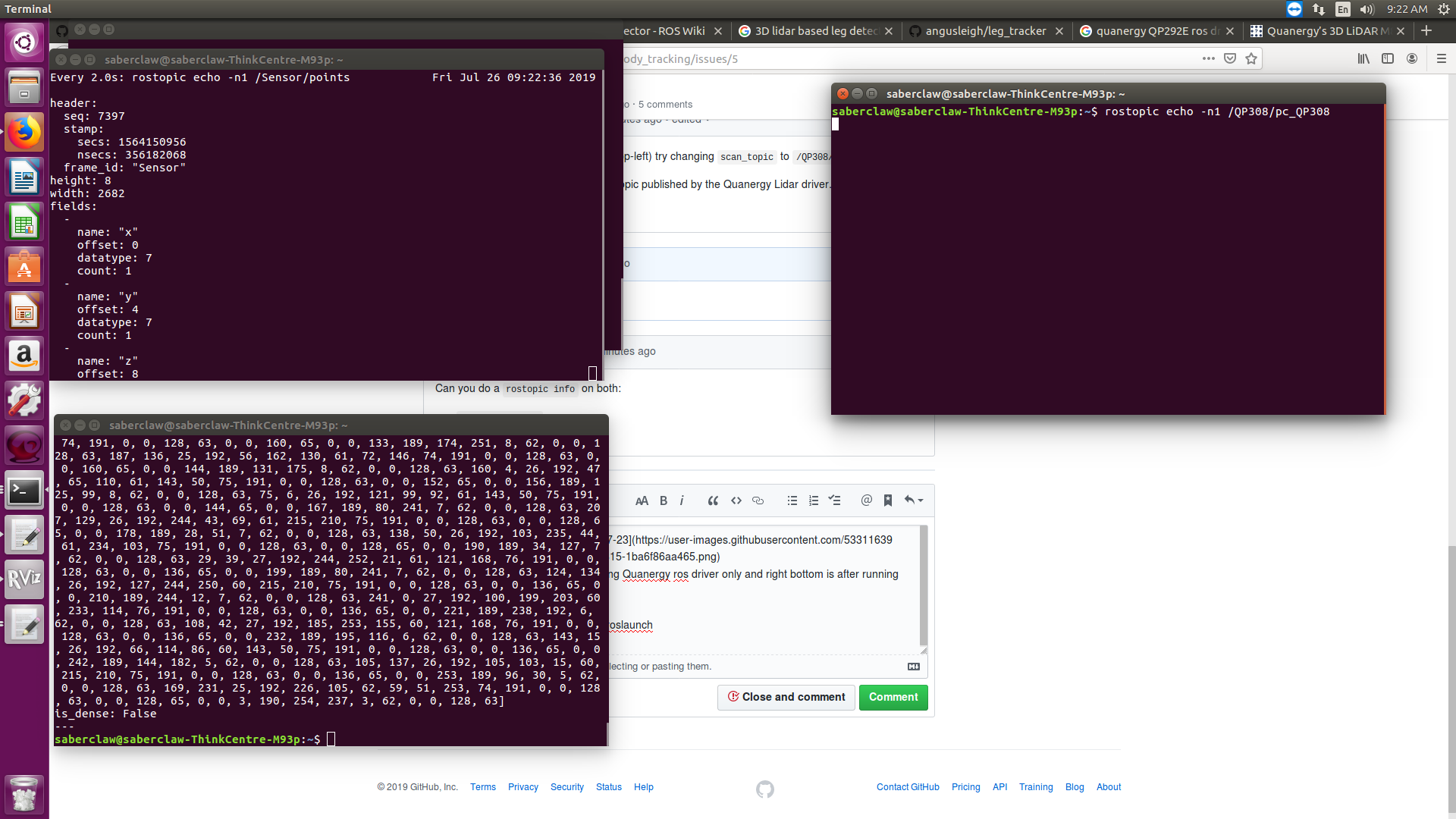
Can you do a rostopic info on both:
/QP308/pc_QP308/Sensor/points
from lidar_body_tracking.
yashspatel09
commented on May 6, 2024

left bottom is rostopic list after running Quanergy ros driver only and right bottom is after running lidar_body_tracking roslaunch
So I believe QP308 is coming from roslaunch. Please check following screenshots. Left side is /Sensor/topics and right side is /QP308
from lidar_body_tracking.
yashspatel09
commented on May 6, 2024
Again I am sorry for troubling you so much
from lidar_body_tracking.
MyNameIsCosmo
commented on May 6, 2024
The frame_id in the topic is set to Sensor.
The URDF robot_name should be set to the same frame_id as the topic:
https://github.com/MyNameIsCosmo/lidar_body_tracking/blob/master/urdf/m8.urdf.xacro#L2
Try changing name="sensor_m8" to name="Sensor"
from lidar_body_tracking.
yashspatel09
commented on May 6, 2024
do I change macro name as well? ( <xacro:macro name="sensor_m8">)
from lidar_body_tracking.
MyNameIsCosmo
commented on May 6, 2024
Nah, the macro name is irrelevant to this issue.
In fact, the macro is redundant for the Xacro file and is confusing, but that's an issue for a later date.
from lidar_body_tracking.
yashspatel09
commented on May 6, 2024

Well something silly mistake is been getting on for sure/
from lidar_body_tracking.
MyNameIsCosmo
commented on May 6, 2024
I derped
The actual value you need to change in the urdf is the link:
https://github.com/MyNameIsCosmo/lidar_body_tracking/blob/master/urdf/m8.urdf.xacro#L8-L10
<child link="Sensor"/>
</joint>
<link name="Sensor">
from lidar_body_tracking.
yashspatel09
commented on May 6, 2024
<?xml version="3.0"?> <robot name="Sensor" xmlns:xacro="http://ros.org/wiki/xacro"> <xacro:macro name="sensor_m8"> <link name="base_link"/> <joint name="m8_joint" type="fixed"> <origin xyz="0 0 0" rpy="0 0 0"/> <parent link="base_link"/> <child link="Sensor"/> </joint> <link name="Sensor"> <visual> <origin xyz="0 0 0" rpy="0 0 0"/> <geometry> <cylinder length="0.0876" radius="0.10315"/> </geometry> <material name="dark_grey"> <color rgba="0.3 0.3 0.3 1"/> </material> </visual> </link> </xacro:macro> <sensor_m8/> </robot>
from lidar_body_tracking.
yashspatel09
commented on May 6, 2024
I did changed it to Sensor much before
from lidar_body_tracking.
yashspatel09
commented on May 6, 2024
Can it be possible that it height might be the reason? I can try placing it higher if needed
from lidar_body_tracking.
MyNameIsCosmo
commented on May 6, 2024
Height shouldn't be a reason since height should remain independent of the data.
Try putting some debug info like ROS_INFO('cloud_cb') into the cloud_cb function, and work your way from there.
Few things to check are:
- frame_id of your sensor topics (use
rostopic echo -n1 /Sensor/points/header/frame_id) - link in the urdf is the same as the frame_id
- there is a pointcloud from the sensor and the dynamic reconfigure settings seem reasonable (you may have to play with cluster sizing, but the defaults worked for the m8 I had)
- There are no clashing roslaunch files (
rospack find lidar_body_trackingshould bring up the current catkin workspace you're working with)
from lidar_body_tracking.
yashspatel09
commented on May 6, 2024
Okay. Just one more thing before I do debugging. What should be the output for pcl_clustered and pcl_filtered when you do rostopic echo pcl_clustered/filtered
from lidar_body_tracking.
MyNameIsCosmo
commented on May 6, 2024
They should look like the same pointcloud message from Sensor/points except with less data
from lidar_body_tracking.
yashspatel09
commented on May 6, 2024
Alrighty. Let me give it a try and see if anything works for me. I will ping you with result once I am done.
Thanks once again
from lidar_body_tracking.
Related Issues (5)
Recommend Projects
-
 React
React
A declarative, efficient, and flexible JavaScript library for building user interfaces.
-
Vue.js
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
-
 Typescript
Typescript
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
-
TensorFlow
An Open Source Machine Learning Framework for Everyone
-
Django
The Web framework for perfectionists with deadlines.
-
 Laravel
Laravel
A PHP framework for web artisans
-
D3
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
-
Recommend Topics
-
javascript
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
-
web
Some thing interesting about web. New door for the world.
-
server
A server is a program made to process requests and deliver data to clients.
-
Machine learning
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
-
Visualization
Some thing interesting about visualization, use data art
-
Game
Some thing interesting about game, make everyone happy.
Recommend Org
-
Facebook
We are working to build community through open source technology. NB: members must have two-factor auth.
-
Microsoft
Open source projects and samples from Microsoft.
-
Google
Google ❤️ Open Source for everyone.
-
Alibaba
Alibaba Open Source for everyone
-
D3
Data-Driven Documents codes.
-
Tencent
China tencent open source team.
from lidar_body_tracking.