download from sample_data_set
Build local image first with command docker build -t photometric_calibration:latest -f ./photomatric_calibration.dockerfile . in current dir.
Modify ./start_docker_container.sh with your local dir path (defualt setting is for my workstation!!!)
Run with paramter
./start_docker_container.sh 0 to run for application, everything you modify will not be saved
./start_docker_container.sh 1 run for development, you can modify code for your own application all files in this dir will be saved
-
prepare your dataset like
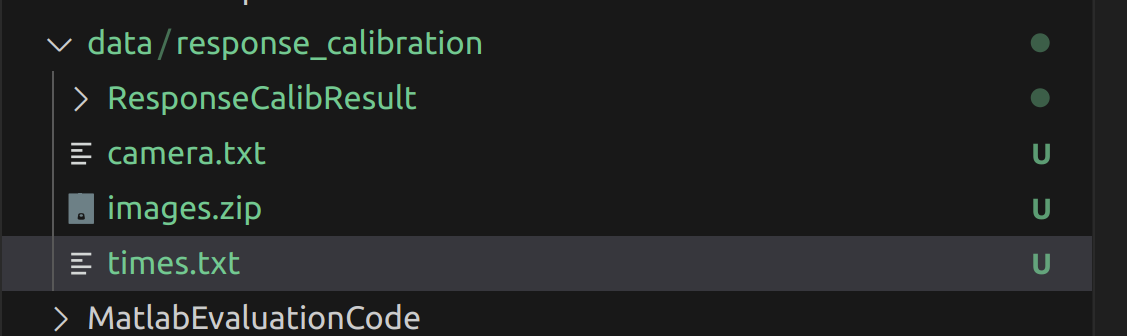
-
camera.txt:

-
run ./responseCalib get calibration result (pcalib.txt)
-
prepare your dataset like (./data/vig_calibration)
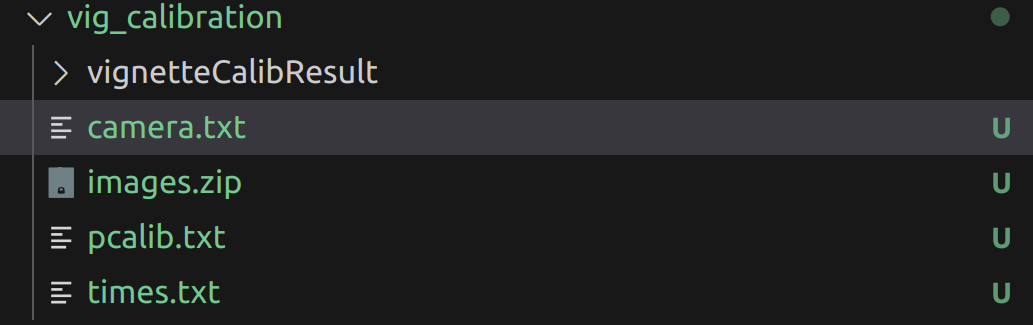
-
run calibration
refer to ./data/response_calibration for more clear file tree
sudo apt-get install libeigen3-dev libopencv-dev
sudo apt-get install zlib1g-dev
cd thirdparty
tar -zxvf libzip-1.1.1.tar.gz
cd libzip-1.1.1/
./configure
make
sudo make install
sudo cp lib/zipconf.h /usr/local/include/zipconf.h # (no idea why that is needed).
see eg here:
http://maztories.blogspot.de/2013/07/installing-aruco-augmented-reality.html
tested with version 1.3.0. which is included in /thirdparty.
cmake . && make
Shows images of a dataset. Meant as example code regarding how to read the dataset. Run with (and replace X with the location of the dataset. Mind the trailing slash):
./playDataset X/sequence_01/
optionally, the calibration is used for
- rectification ( r )
- response function inversion ( g )
- vignette removal ( v )
- removal of over-exposed (white) images. ( o ).
Pressing the respective key toggles the option. See code for details.
Performs photometric calibration from a set of images, showing the exact same scene at different exposures. Run with (and replace X with the location of the dataset. Mind the trailing slash):
./responseCalib X/CalibrationDatasets/narrow_sweep1/"
outputs some intermediate results, and pcalib.txt containing the calibrated inverse response function to ./photoCalibResult. See code for details.
Performs photometric calibration from a set of images, showing a flat surface with an ARMarker. Run with (and replace X with the location of the dataset. Mind the trailing slash):
./vignetteCalib X/CalibrationDatasets/narrow_vignette/"
outputs some intermediate results, and vignette.png (16-bit png) containing the calibrated vignette function. vignetteSmoothed.png is a slightly smoothed version, mainly to remove the black borders (pixels at the border are never observed). See code for details. WARNING: requires a lot of Memory (16GB ram for 1000 input images)! Can easily be changed at the cost of slightly slower runtime... you'll have to do that yourself though.
Implements Sim(3) alignment of a tracked trajectory to the ground-truth segments, and subsequent computation of the different error values. See MatlabEvaluationCode/Example.m for an example, and some documentation regarding the computed values. Further, we include example results computed with DSO for all 50 sequences.
Original Tag No 213
The code provided in this repository is licensed under the BSD license.


