This repository contains the solutions from all the programming assignements and quiz in this Coursera Course.
How can robots determine their state and properties of the surrounding environment from noisy sensor measurements in time? In this module you will learn how to get robots to incorporate uncertainty into estimating and learning from a dynamic and changing world. Specific topics that will be covered include probabilistic generative models, Bayesian filtering for localization and mapping. Some experience programming with MATLAB or Octave is recommended (we will use MATLAB in this course.) MATLAB will require the use of a 64-bit computer. You need to have Matlab installed if you want to run the programs on your machine with the appropriate libraries installed. The data used specifically for this course are not included but any similar data should work fine.Modules are divided into:
- Robotics: Estimation and Learning
- Introduction to MATLAB and tools to sample from Single or Multivariate Gaussians. Week 1 Assignment required to Estimate and Target the Color in Dataset
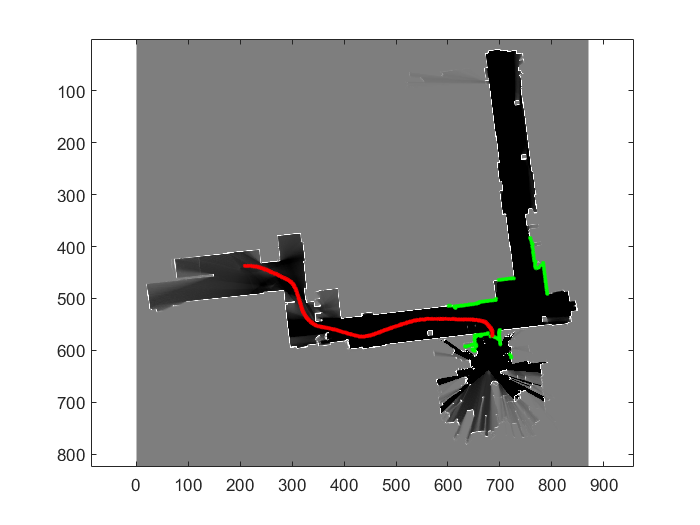
* Week 3 introduces us to Mapping and crucial aspects of Localization. In Week 3 Assignment, we build an Occupancy Grid Map, that reads the Lidar Data off a Bot and using log loss data, designates certaininty to a discretized map. Darker the map -> Higher the Certainity of Free space.
<p align="center">