Comments (6)
 duduzai2019
commented on July 2, 2024
duduzai2019
commented on July 2, 2024
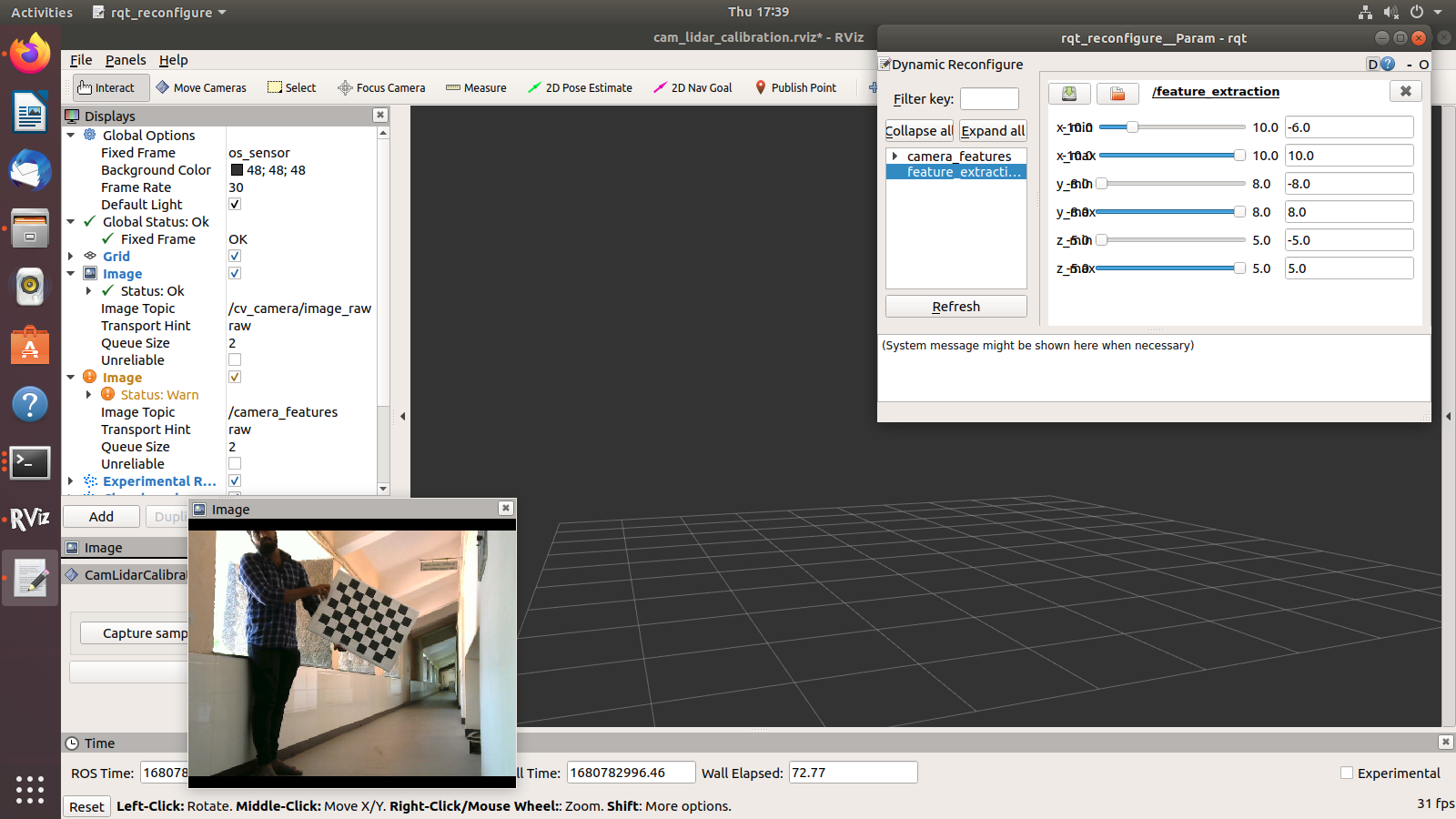
I am using this code with a usb cam and ouster os1 lidar on ROS noetic. I used a prerecorded rosbag for the data. I have done some changes in the cam_lidar_calibration.rviz.
Class: rviz/Image Enabled: true Image Topic: /cv_camera/image_rawand
Global Options: Background Color: 48; 48; 48 Default Light: true Fixed Frame: os_sensor Frame Rate: 30so that this code will work for my os1 lidar and camera. While running the launch file for rviz, the image is loading without any issues, but the pointclouds from os_sensor is not loading. Hence the rqt gui is also not working. I have added the screenshots below.
Can someone please tell me what all changes should i make for my code to work properly? Thanks in advance
hi, friend, you can change the src/cam_lidar_calibration/cfg/params.yaml topic ,for example, # camera_topic: "/gmsl/A0/image_color" to lidar_topic: "/rslidar_points"(this is my lidar topic)

from cam_lidar_calibration.
duduzai2019
commented on July 2, 2024

[feature_extraction-1] process has died [pid 93910, exit code -6, cmd /home/duduzai/SPbot/itsc_calib_ws/devel/lib/cam_lidar_calibration/feature_extraction_node __name:=feature_extraction __log:=/home/duduzai/.ros/log/51abcb48-da75-11ed-8ebb-97b7bce6879a/feature_extraction-1.log].
log file: /home/duduzai/.ros/log/51abcb48-da75-11ed-8ebb-97b7bce6879a/feature_extraction-1*.log
somebody can tell me why? thanks
from cam_lidar_calibration.
 Haishanliu
commented on July 2, 2024
Haishanliu
commented on July 2, 2024
Can someone answer this issue? I still can't find a way to use the ouster data with this pkg. When I try to use the extractor, it doesn't filter the point cloud.
Thanks in advance.
from cam_lidar_calibration.
 juliangaal
commented on July 2, 2024
juliangaal
commented on July 2, 2024
It says right there: "width and height of the pattern should have bigger than 2 in function findChessboardCorners. Your parameters for the board and/or camera info are wrong.
Furthermore, no pointcloud is shown in Rviz. When all your parameters are correct, the filtered cloud will be shown. Your pointcloud topic seems to be wrong, because your reconf parameters are fine.
from cam_lidar_calibration.
 jclinton830
commented on July 2, 2024
jclinton830
commented on July 2, 2024
@rupikaraj are you collecting data and then playing back along with this tool or are you trying to do the calibration live?
To me it looks like you have not setup the config parameters in the files within the cfg folder properly. If you are still having issues please feel free to reopen this. I am closing it for now.
from cam_lidar_calibration.
 HaogeZhou
commented on July 2, 2024
HaogeZhou
commented on July 2, 2024
I am using this code with a usb cam and ouster os1 lidar on ROS noetic. I used a prerecorded rosbag for the data. I have done some changes in the cam_lidar_calibration.rviz.
Class: rviz/Image Enabled: true Image Topic: /cv_camera/image_rawand
Global Options: Background Color: 48; 48; 48 Default Light: true Fixed Frame: os_sensor Frame Rate: 30so that this code will work for my os1 lidar and camera. While running the launch file for rviz, the image is loading without any issues, but the pointclouds from os_sensor is not loading. Hence the rqt gui is also not working. I have added the screenshots below.
Can someone please tell me what all changes should i make for my code to work properly? Thanks in advance
Hi @rupikaraj , I meet the same problem now. Have you find out how to solve this problem?
from cam_lidar_calibration.
Related Issues (20)
- Cannot catpture image using Manually crafted rosbag HOT 2
- What is the sign of "translation_error"? HOT 2
- capture error HOT 9
- Question about camera undistortion in non-fisheye cases HOT 9
- Can't filter point cloud with rqt HOT 42
- Lidar point projections are wrong HOT 3
- openCV issue with new cv version
- The chessboard has been filtered success. But the RANSAC unsuccessful occurs if i click capture sample HOT 6
- Maximum Value of Feature Extraction
- Reprojection Image Seems Strange HOT 2
- tf static_transform_broadcaster does not fit calibration result HOT 3
- Help me please. HOT 1
- Does it creaate a problem with ros distriubutions. HOT 2
- Error when running the quick start HOT 3
- The chessboard has been filtered success. But the RANSAC unsuccessful occurs if i click capture sample HOT 1
- I am getting pcl::PCLBase<pcl::PointXYZIR> and undefined reference to `pcl::KdTreeFLANN<pcl::PointXYZIR, flann::L2_Simple<float> >::KdTreeFLANN(bool) while library linking HOT 2
- transforming results to lidar to camera frame
- Question about the paper HOT 1
- frame_id error Causing RViz Freeze During Background Capture HOT 2
Recommend Projects
-
 React
React
A declarative, efficient, and flexible JavaScript library for building user interfaces.
-
Vue.js
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
-
 Typescript
Typescript
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
-
TensorFlow
An Open Source Machine Learning Framework for Everyone
-
Django
The Web framework for perfectionists with deadlines.
-
 Laravel
Laravel
A PHP framework for web artisans
-
D3
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
-
Recommend Topics
-
javascript
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
-
web
Some thing interesting about web. New door for the world.
-
server
A server is a program made to process requests and deliver data to clients.
-
Machine learning
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
-
Visualization
Some thing interesting about visualization, use data art
-
Game
Some thing interesting about game, make everyone happy.
Recommend Org
-
Facebook
We are working to build community through open source technology. NB: members must have two-factor auth.
-
Microsoft
Open source projects and samples from Microsoft.
-
Google
Google ❤️ Open Source for everyone.
-
Alibaba
Alibaba Open Source for everyone
-
D3
Data-Driven Documents codes.
-
Tencent
China tencent open source team.
from cam_lidar_calibration.