This is the repository that contains the complete work on Searching and Precision Landing of an AR Drone 2.0 on a stationary landing platform using Neural Network. Watch the following video to get a better overview what it does.
For more info (https://www.eionix.co.in/2015/11/14/searching-and-precision-landing-of-ar.html)
Following installation steps assume you hav a ROS Indigo installed in an Ubuntu 14.04 Linux Distro.
First create a workspace
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspaceClone this repository and make it.
cd ~/catkin_ws/src
git clone https://github.com/AutonomyLab/ardrone_autonomy.git -b indigo-devel
cd ~/catkin_ws
rosdep install --from-paths src -i
catkin_makeIf you face any problems with ardrone_autonomy ref this site [http://ardrone-autonomy.readthedocs.org/en/latest/installation.html]. If you are just getting started, go through the link to get an overview. This package is only needed if you are implementing this on a real drone (Not in a simulator like Gazebo).
The original package supports fuerte. There is a forked package by dougvk [https://github.com/dougvk/tum_simulator] for Indigo. (It still has some issues). Clone and make that package.
cd ~/catkin_ws/src
git clone https://github.com/dougvk/tum_simulator.git
cd ~/catkin_ws/
catkin_makeTry launching an empty world file to confirm everything works fine till now.
cd ~/catkin_ws/
source devel/setup.bash
roslaunch cvg_sim_gazebo ardrone_testworld.launchIf Gazebo is started with an AR drone in it, then everything works fine. (AR Drone will be there in between the two houses. Rotate the world before trying to debug.) Don't bother if you find any errors or warnings.
We are using the ar_track_alvar package for detecting the tags. Install the package.
sudo apt-get install ros-indigo-ar-track-alvarClone this from my repository. Clone the brach ardrone_control.
cd ~/catkin_ws/src
git clone -b ardrone_control --single-branch https://github.com/krishnan793/ardrone_control.git
cd ~/catkin_ws/
catkin_makeClone this repository and make it.
cd ~/catkin_ws/src/
git clone https://github.com/krishnan793/ar2landing_neural.git
cd ~/catkin_ws/
catkin_makeIf you followed everything correctly following launch file should work correctly
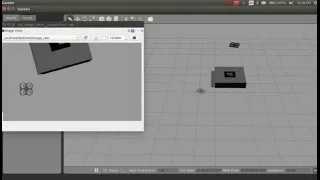
roslaunch ar2landing_gazebo landing_platform.launchYou should now see a gazebo simulation world with a spawned urdf model of AR Drone 2.0. Open another terminal and source it. Then run
cd ~/catkin_ws/
source devel/setup.bash
rosrun ar2landing_neural autonomous_landingNeural.py
autonomous_search.pyOpen another terminal, source it and run
cd ~/catkin_ws/
source devel/setup.bash
rosrun ar2landing_neural autonomous_search.pyYou should now see AR Drone 2.0 takeoff and follows a lawn mower pattern. Open another terminal and run
rosrun rqt_image_view rqt_image_viewSelect /ardrone/bottom/image_raw.
You can now see AR Drone is adjusting to orient itself and trying to land on the platform while maintainin itself in the middle. Also it decreases the altitude on along with it. Once it reaches a safe distance it will land. The package contains pre trained weights and the network is using those weights now. The package contains a node called train_data_collector.py which can be used to capture training data and train.py which can be used to train the network.
If you are going to implemenent this on a real drone you need to copy the camera baliberation file to ~/.ros/camera_info/. Somehow the default camera caliberation file is not taking. Do the following step to use the provided camera caliberation file.
cp ~/catkin_ws/ardrone_autonomy/data/camera_info/ardrone_bottom.yaml ~/.ros/camera_info/
Run
roslaunch ar2landing_gazebo landing_platform_drone.launch
instead of landing_platform.launch. Rest are same as the simulation.

