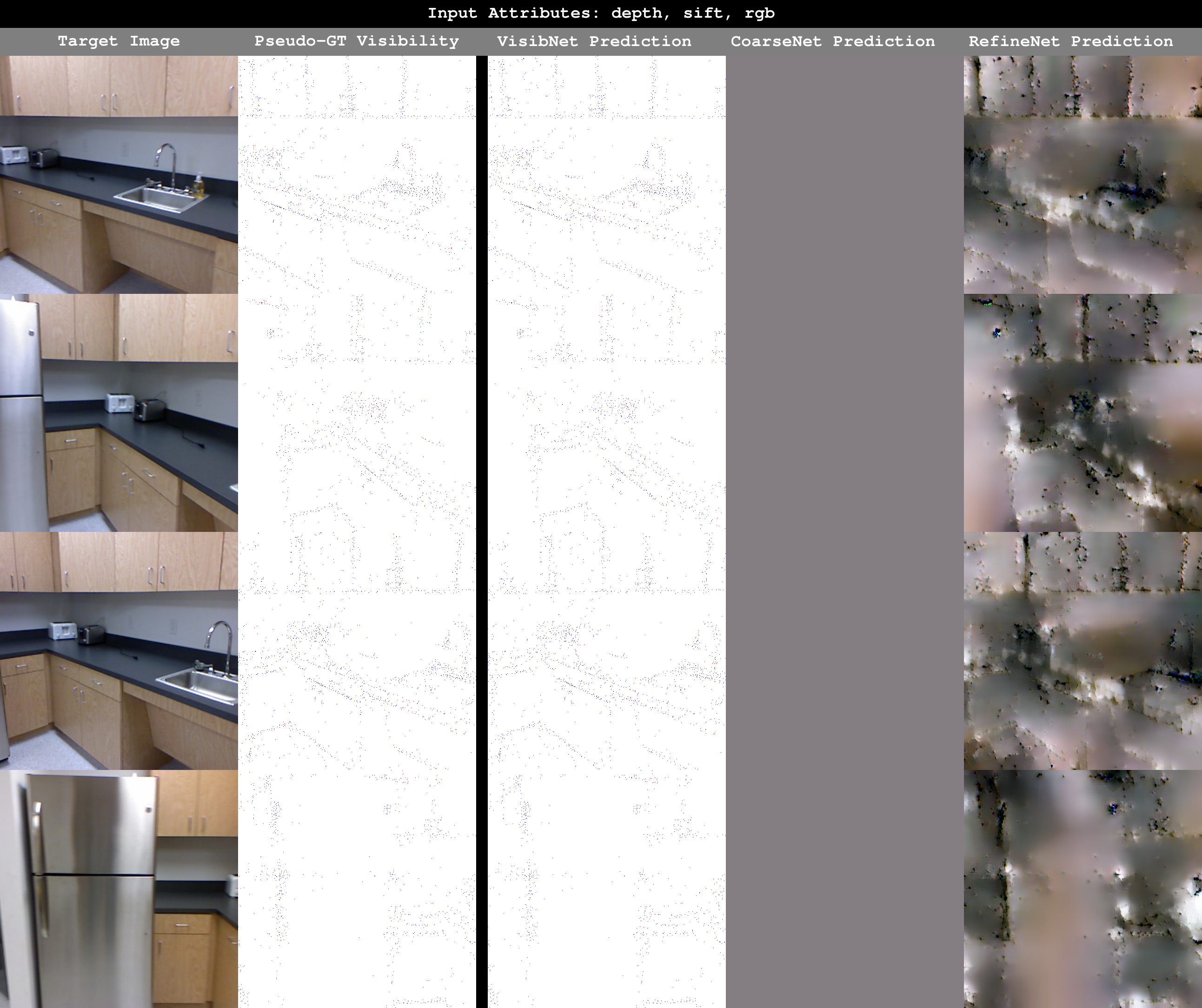
Synthesizing Imagery from a SFM Point Cloud: From left to right--Top view of a SfM reconstruction of an indoor scene; 3D points projected into a viewpoint associated with a source image; the image reconstructed using our technique; and the source image.
Synthesizing Imagery from a SFM Point Cloud: From left to right--Top view of a SfM reconstruction of an indoor scene; 3D points projected into a viewpoint associated with a source image; the image reconstructed using our technique; and the source image.
This repository contains a reference implementation of the algorithms described in the CVPR 2019 paper Revealing Scenes by Inverting Structutre from Motion Reconstructions. This paper was selected as a Best Paper Finalist at CVPR 2019. For more details about the project, please visit the main project page.
If you use this code/model for your research, please cite the following paper:
@inproceedings{pittaluga2019revealing,
title={Revealing scenes by inverting structure from motion reconstructions},
author={Pittaluga, Francesco and Koppal, Sanjeev J and Bing Kang, Sing and Sinha, Sudipta N},
booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
pages={145--154},
year={2019}
}
The code was tested with Tensorflow 1.10, Ubuntu 16, NVIDIA TitanX / NVIDIA 1080ti.
See requirements.txt. The training code depends only on tensorflow. The demos additionally depend on Pillow and scikit-image.
Run $ bash download_wts.sh to programatically download and untar wts.tar.gz (1.24G). Alternatively, manually download wts.tar.gz from here and untar it in the root directory of the repo.
Run $ bash download_data.sh to programatically download and untar data.tar.gz (11G). Alternatively, manually download data.tar.gz from here and untar it in the root directory of the repo.
$ python demo_5k.py
$ python demo_colmap.py
Note: Run $ python demo_5k.py --help and $ python demo_colmap.py --help to see the various demo options available.
$ python train_visib.py
$ python train_coarse.py
$ python train_refine.py
Note: Run $ python train_*.py --help to see the various training options available.