This is the official PyTorch implementation of the following publication:
LCD: Learned Cross-domain Descriptors for 2D-3D Matching
Quang-Hieu Pham, Mikaela Angelina Uy, Binh-Son Hua, Duc Thanh Nguyen, Gemma Roig, Sai-Kit Yeung
AAAI Conference on Artificial Intelligence, 2020 (Oral)
Paper | Homepage | Video
Download http://hkust-vgd.ust.hk/2d3dmatch/
We collect a new dataset of 2D-3D correspondences by leveraging the availability of several 3D datasets from RGB-D scans. Specifically, we use the data from SceneNN and 3DMatch. Our training dataset consists of 110 RGB-D scans, of which 56 scenes are from SceneNN and 54 scenes are from 3DMatch. The 2D-3D correspondence data is generated as follows. Given a 3D point which is randomly sampled from a 3D point cloud, we extract a set of 3D patches from different scanning views. To find a 2D-3D correspondence, for each 3D patch, we re-project its 3D position into all RGB-D frames for which the point lies in the camera frustum, taking occlusion into account. We then extract the corresponding local 2D patches around the re-projected point. In total, we collected around 1.4 millions 2D-3D correspondences.
Required PyTorch 1.2 or newer. Some other dependencies are:
- h5py
- Open3D
We released three pre-trained LCD models with different descriptor size: LCD-D256, LCD-D128, and LCD-D64.
All of the models can be found in the logs folder.
After downloading our dataset, put all of the hdf5 files into the data folder.
To train a model on the 2D-3D Match dataset, use the following command:
$ python train.py --config config.json --logdir logs/LCD
Log files and network parameters will be saved to the logs/LCD folder.
This demo aligns two 3D colored point clouds using our pre-trained LCD descriptor with RANSAC. How to run:
$ python -m apps.align_point_cloud samples/000.ply samples/002.ply --logdir logs/LCD-D256/
For more information, use the --help option.
After aligning two input point clouds, the final registration result will be shown. For example:
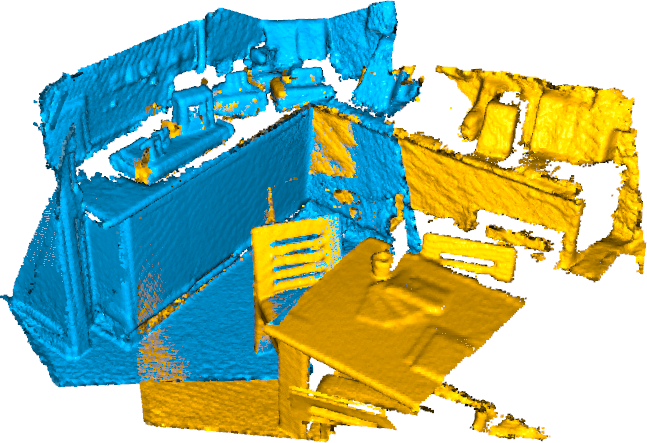
Note: This demo requires Open3D installed.
We provide two scripts that we found useful during our data processing. Please take a look and adopt it to your need.
scripts/sample_train.py: Sample 2D-3D correspondences from the 3DMatch datasetscripts/convert_valtest.py: Convert theval-set.matandtest-set.matfiles from 3DMatch into HDF5 format.
If you find our work useful for your research, please consider citing:
@inproceedings{pham2020lcd,
title = {{LCD}: {L}earned cross-domain descriptors for 2{D}-3{D} matching},
author = {Pham, Quang-Hieu and Uy, Mikaela Angelina and Hua, Binh-Son and Nguyen, Duc Thanh and Roig, Gemma and Yeung, Sai-Kit},
booktitle = {AAAI Conference on Artificial Intelligence},
year = 2020
}
If you use our dataset, please cite the following papers:
@inproceedings{hua2016scenenn,
title = {{SceneNN}: {A} scene meshes dataset with a{NN}otations},
author = {Hua, Binh-Son, and Pham, Quang-Hieu and Nguyen, Duc Thanh and Tran, Minh-Khoi and Yu, Lap-Fai and Yeung, Sai-Kit},
booktitle = {International Conference on 3D Vision},
year = 2016
}
@inproceedings{zeng20173dmatch,
title = {{3DMatch}: {L}earning local geometric descriptors from {RGB}-{D} reconstructions},
author= {Zeng, Andy and Song, Shuran and Nie{\ss}ner, Matthias and Fisher, Matthew and Xiao, Jianxiong and Funkhouser, Thomas},
booktitle = {IEEE Conference on Computer Vision and Pattern Recognition},
year = 2017
}
Our code is released under BSD 3-Clause license (see LICENSE for more details).
Our dataset is released under CC BY-NC-SA 4.0 license.
Contact: Quang-Hieu Pham ([email protected])














































































































