waymo-research / waymo-open-dataset Goto Github PK
View Code? Open in Web Editor NEWWaymo Open Dataset
Home Page: https://www.waymo.com/open
License: Other
Waymo Open Dataset
Home Page: https://www.waymo.com/open
License: Other

















































































































































































Hi! I'm using Waymo Open Dataset for my own academic research. I'm still vague about how to use the provided tools to do evaluation on the results. Specifically, how to generate the bin files of my own results and the ground truths (for both detection and tracking)? And, is tracking evaluation tool ready for use now?
I really appreciate the effort you've put in producing this high-quality dataset. Thank you!
Hi,
Do you provide the ego-motion of the driving car with respect to some reference point in the world coordinate system?
This can be similar to other datasets like nuScenes and Argoverse.
Thanks in advance
After succesfully downloading all the dependencies, I tried running the test program of your colab on my local machine setup, but it cannot import dataset_pb2 because it does not exist in waymo-open-dataset.
Also running pip3 install waymo-open-dataset returns a "no matching distribution found"
firstly I compiled with gcc-5 and get error log as:
WARNING: /home/chris/.cache/bazel/_bazel_chris/b2fd8959c85968b8f97fc8dbb85c5c52/external/local_config_tf/BUILD:3823:1: target 'libtensorflow_framework.so' is both a rule and a file; please choose another name for the rule
INFO: Analyzed 62 targets (0 packages loaded, 0 targets configured).
INFO: Found 62 targets...
ERROR: /home/chris/work/waymo-od/waymo_open_dataset/math/BUILD:58:1: C++ compilation of rule '//waymo_open_dataset/math:polygon2d' failed (Exit 1) gcc failed: error executing command /usr/bin/gcc -U_FORTIFY_SOURCE -fstack-protector -Wall -Wunused-but-set-parameter -Wno-free-nonheap-object -fno-omit-frame-pointer -g0 -O2 '-D_FORTIFY_SOURCE=1' -DNDEBUG -ffunction-sections ... (remaining 46 argument(s) skipped)
Use --sandbox_debug to see verbose messages from the sandbox
waymo_open_dataset/math/polygon2d.cc: In static member function 'static std::string waymo::open_dataset::Polygon2d::PrintPointsToString(const std::vectorwaymo::open_dataset::Vec2d&, bool)':
waymo_open_dataset/math/polygon2d.cc:484:59: error: 'DECIMAL_DIG' was not declared in this scope
::absl::StrAppendFormat(&result, "{%.*e, %.*e},\n", DECIMAL_DIG,
^
INFO: Elapsed time: 1.334s, Critical Path: 1.25s
INFO: 3 processes: 3 linux-sandbox.
FAILED: Build did NOT complete successfully
then I upgrade gcc to v7, the compile still cannot pass:
WARNING: /home/chris/.cache/bazel/_bazel_chris/b2fd8959c85968b8f97fc8dbb85c5c52/external/local_config_tf/BUILD:3823:1: target 'libtensorflow_framework.so' is both a rule and a file; please choose another name for the rule
INFO: Analyzed 62 targets (0 packages loaded, 0 targets configured).
INFO: Found 62 targets...
ERROR: /home/chris/work/waymo-od/waymo_open_dataset/math/BUILD:76:1: undeclared inclusion(s) in rule '//waymo_open_dataset/math:segment2d':
this rule is missing dependency declarations for the following files included by 'waymo_open_dataset/math/segment2d.cc':
'/usr/lib/gcc/x86_64-linux-gnu/7/include/stdint.h'
'/usr/lib/gcc/x86_64-linux-gnu/7/include/stddef.h'
'/usr/lib/gcc/x86_64-linux-gnu/7/include/stdarg.h'
'/usr/lib/gcc/x86_64-linux-gnu/7/include-fixed/limits.h'
'/usr/lib/gcc/x86_64-linux-gnu/7/include-fixed/syslimits.h'
INFO: Elapsed time: 1.341s, Critical Path: 1.25s
INFO: 0 processes.
FAILED: Build did NOT complete successfully
I noticed that speed_x, speed_y, acc_x and acc_y are labeled under the laser labels for objects, can I know which coordinate are these value in, and for curiosity, I found that some of the speed values are 0, while some are numbers like 1e-15(which is also 0...), how do you get these values and why are them not consistent?
Hello,
When I follow the "Build and test" step described in the Tutorialhttps://colab.research.google.com/github/waymo-research/waymo-open-dataset/blob/r1.0/tutorial/tutorial.ipynb#scrollTo=-pVhOfzLx9us, I can't build it successfully.
This is the log :
In file included from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor_shape.h:22:0,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.h:23,
from ./waymo_open_dataset/metrics/ops/utils.h:23,
from waymo_open_dataset/metrics/ops/utils.cc:16:
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/types.pb.h:17:2: error: #error This file was generated by an older version of protoc which is
#error This file was generated by an older version of protoc which is
^
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/types.pb.h:18:2: error: #error incompatible with your Protocol Buffer headers. Please
#error incompatible with your Protocol Buffer headers. Please
^
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/types.pb.h:19:2: error: #error regenerate this file with a newer version of protoc.
#error regenerate this file with a newer version of protoc.
I find the types.pb.h and it says "#if 3006001 < GOOGLE_PROTOBUF_MIN_PROTOC_VERSION"
But I'm pretty sure that my bazel version is 0.28.0 and the protoc version is 3.6.1.
What should I do ? Please help me, thank you !
When I want to install waymo-open-dataset in my system, it went wrong as below:
Collecting waymo-open-dataset
Could not find a version that satisfies the requirement waymo-open-dataset (from versions: )
No matching distribution found for waymo-open-datasetHi,
I am trying to draw bounding boxes on the images. Is this the right way to convert current data (center_x, center_y, width, length) to rectangular bounding box (left, top, right, bottom)?
left = center_x - (length/2)
top = center_y - (width/2)
right = center_x + (length/2)
bottom = center_y + (width/2)
Hi, I look at the source code of convert_range_image_to_point_cloud, and I find for TOP lidar point cloud , if I want to convert the point cloud to vehicle frame, the source code will first convert the point cloud according the TOP lidar's extrinsic to vehicle frame, and then use range_image_top_pose convert to another coordiante, and then use world_to_vehicle convert the point cloud to vehicle frame, why do that, the TOP lidar's extrinsic seems not enough? but for other lidars, just use the lidar's extrinsic is enough?
Hi,
This is my first time to use this data, I learn it from Waymo Open Dataset Tutorial.
But when I want to get the point cloud data such like [x, y, z] or depth_data [distance, ](The distance of each pixel.), I failed to understand.
Here is my some code:
def load_dataset(filenames):
dataset = tf.data.TFRecordDataset(filenames=filenames,
compression_type='')
frames = []
for data in dataset:
frame = open_dataset.Frame()
frame.ParseFromString(bytearray(data.numpy()))
frames.append(frame)
return frames
frames = load_dataset(TF_RECORD_FILE)
# Point Cloud
points, cp_points = frame_utils.convert_range_image_to_point_cloud(
frames[0],
range_images,
camera_projections,
range_image_top_pose)
When I print the point cloud data:
print(points[0][0])
# Return
[-36.440834 -0.03664176 3.5856297 ]
print(cp_points[0][0])
# Return
[0 0 0 0 0 0]
So can you tell me about the data format of every channel? And If I want to use it such like (x, y, z) or (distance, ), how to do?
I am researching on "BoxCars: Improving Fine-Grained Recognition of Vehicles using 3D Bounding Boxes in Traffic Surveillance"
Is there any code or hint( like the distance between the 2d camera and LIDAR) to convert the 3D bounding box location in LIDAR to 2D IMAGE?
Thanks!
As reading all the tfrecords together will make it hard to pick consecutive frames for tracking purpose, I can only decode the tfrecords and then save it in the customized format for tracking. Is there any suggestion on how to extract trajectories of objects(from consecutive frames in same segment) directly from the tfrecord files provided?
why a lidar frame can be converted to two range image?
what do you mean The strongest two intensity returns are provided for all five lidars?
one point in lidar point cloud only have one indensity, how you get the strongest two?
Hi,
a short question that how can I obtain the panoramic image (combining image from all cameras) from the dataset?
By the way, I am curious about the specific types of the lidars, and regarding the properties, what are the major differences between mid-range and short-range lidars?
Thanks.
I could not find any doc or example about reading the data/labels from the downloaded tfrecord file. Any suggestion?
Hi, I have one feedback. Please see this figure, https://s2.ax1x.com/2019/08/26/mWmH2R.png, the point clouds are distorted when the vehicle is moving. If such distortion can be fixed, it could be better.
Thanks.
Due to the information of one frame is complex especially the lidar information. So It would be great that we can get the frame's information by dict format. So the dataset can be easily training on the other platform. It would be possible?
Hi,
There's a bounding box with a vehicle label but it is behind a garage. How are these bounding boxes determined?

waymo-open-dataset/configure.sh
Line 44 in 9c66311
$ bazel test waymo_open_dataset/utils/...
INFO: Analyzed 7 targets (1 packages loaded, 14 targets configured).
INFO: Found 4 targets and 3 test targets...
FAIL: //waymo_open_dataset/utils:range_image_utils_test (see /home/xxxxxxx/.cache/bazel/xxxxx/32a12db1b695731af2916d563fbc4343/execroot/__main__/bazel-out/k8-opt/testlogs/waymo_open_dataset/utils/range_image_utils_test/test.log)
FAIL: //waymo_open_dataset/utils:box_utils_test (see /home/xxxxxx/.cache/bazel/xxxxxx/32a12db1b695731af2916d563fbc4343/execroot/__main__/bazel-out/k8-opt/testlogs/waymo_open_dataset/utils/box_utils_test/test.log)
FAIL: //waymo_open_dataset/utils:transform_utils_test (see /home/xxxxxxx/.cache/bazel/xxxxx/32a12db1b695731af2916d563fbc4343/execroot/__main__/bazel-out/k8-opt/testlogs/waymo_open_dataset/utils/transform_utils_test/test.log)
INFO: Elapsed time: 13.571s, Critical Path: 13.11s
INFO: 3 processes: 3 linux-sandbox.
INFO: Build completed, 3 tests FAILED, 13 total actions
//waymo_open_dataset/utils:box_utils_test FAILED in 12.6s
/home/xxxxxx/.cache/bazel/_bazel_xxxxx/32a12db1b695731af2916d563fbc4343/execroot/__main__/bazel-out/k8-opt/testlogs/waymo_open_dataset/utils/box_utils_test/test.log
//waymo_open_dataset/utils:range_image_utils_test FAILED in 12.3s
/home/xxxxxx/.cache/bazel/_bazel_xxxxxx/32a12db1b695731af2916d563fbc4343/execroot/__main__/bazel-out/k8-opt/testlogs/waymo_open_dataset/utils/range_image_utils_test/test.log
//waymo_open_dataset/utils:transform_utils_test FAILED in 13.1s
/home/xxxxxx/.cache/bazel/_bazel_xxxx/32a12db1b695731af2916d563fbc4343/execroot/__main__/bazel-out/k8-opt/testlogs/waymo_open_dataset/utils/transform_utils_test/test.log
I followed the quick start tutorial. My tensorflow version is the same (1.14.0).
It is not possible to create a python 3.7 linux pip package by editing the docker file in this page, right? https://github.com/waymo-research/waymo-open-dataset/tree/master/pip_pkg_scripts
I tried adding these commands to dockerfile but did not work:
RUN apt install python-pip
RUN add-apt-repository ppa:deadsnakes/ppa
RUN apt-get update
RUN apt-get install python3.7
RUN apt-get install python3.7-dev
Getitng error "No module named 'apt_pkg'" while adding ppa:deadsnakes/ppa repository.
I can install python 3.7 with above commands using base ubuntu 16.04 image in a docker, but not with your custom-op-ubuntu image..
Does compute_range_image_polar and compute_range_image_cartesian return range images in vehicle frame?
I assume it does because in the tutorial extract_point_cloud_from_range_image is called with an extrinsic transform that is from lidar frame to vehicle frame:
waymo-open-dataset/waymo_open_dataset/utils/frame_utils.py
Lines 131 to 147 in 60df55a
In the docs for compute_range_image_cartesian it says that it expect the range image in polar coordinates to be in sensor frame?
Hello,
I can't show images following the tutorial. What should I do?
Thanks!
This is the log
Traceback (most recent call last):
File "/home/user/.env/dl3/lib/python3.7/site-packages/tensorflow/python/ops/gen_image_ops.py", line 1169, in decode_jpeg
"acceptable_fraction", acceptable_fraction, "dct_method", dct_method)
tensorflow.python.eager.core._FallbackException: This function does not handle the case of the path where all inputs are not already EagerTensors.
During handling of the above exception, another exception occurred:
Traceback (most recent call last):
File "Waymo.py", line 77, in
[3, 3, index+1])
File "Waymo.py", line 34, in image_show
plt.imshow(tf.image.decode_jpeg(data), cmap=cmap)
File "/home/user/.env/dl3/lib/python3.7/site-packages/tensorflow/python/ops/gen_image_ops.py", line 1178, in decode_jpeg
name=name, ctx=_ctx)
File "/home/user/.env/dl3/lib/python3.7/site-packages/tensorflow/python/ops/gen_image_ops.py", line 1255, in decode_jpeg_eager_fallback
contents = _ops.convert_to_tensor(contents, _dtypes.string)
File "/home/user/.env/dl3/lib/python3.7/site-packages/tensorflow/python/framework/ops.py", line 1087, in convert_to_tensor
return convert_to_tensor_v2(value, dtype, preferred_dtype, name)
File "/home/user/.env/dl3/lib/python3.7/site-packages/tensorflow/python/framework/ops.py", line 1145, in convert_to_tensor_v2
as_ref=False)
File "/home/user/.env/dl3/lib/python3.7/site-packages/tensorflow/python/framework/ops.py", line 1224, in internal_convert_to_tensor
ret = conversion_func(value, dtype=dtype, name=name, as_ref=as_ref)
File "/home/user/.env/dl3/lib/python3.7/site-packages/tensorflow/python/framework/constant_op.py", line 305, in _constant_tensor_conversion_function
return constant(v, dtype=dtype, name=name)
File "/home/user/.env/dl3/lib/python3.7/site-packages/tensorflow/python/framework/constant_op.py", line 246, in constant
allow_broadcast=True)
File "/home/user/.env/dl3/lib/python3.7/site-packages/tensorflow/python/framework/constant_op.py", line 254, in _constant_impl
t = convert_to_eager_tensor(value, ctx, dtype)
File "/home/user/.env/dl3/lib/python3.7/site-packages/tensorflow/python/framework/constant_op.py", line 115, in convert_to_eager_tensor
return ops.EagerTensor(value, handle, device, dtype)
TypeError: Cannot convert provided value to EagerTensor. Provided value: bytearray(b'
Hi!
In the tutorial, lidar data does not contain intensity,how to get lidar data with intensity and how to get a display like vehicle-3D-labeling-example,thanks
I'm trying to write a tf.data pipeline, but i cannot figure out how to load data when tensorflow is not in eager mode.
FILENAME = "/home/skaae/Downloads/waymo/training_0000/segment-13519445614718437933_4060_000_4080_000_with_camera_labels.tfrecord"
dataset = tf.data.TFRecordDataset(FILENAME, compression_type='')
def parse_data(data):
frame = open_dataset.Frame()
frame.ParseFromString(bytearray(data.numpy())) # <--- is Tensor in normal mode?
range_images, camera_projections,range_image_top_pose = parse_range_image_and_camera_projection(frame)
range_image_top = range_images[open_dataset.LaserName.TOP][0]
range_image_top_tensor = tf.reshape(
tf.convert_to_tensor(range_image_top.data), range_image_top.shape.dims)
return range_image_top_tensor
parsed_dataset = dataset.map(parse_data)I am newbie of deep-learning.
Before question, I apologize with my poor English skill.
I want to know what 'metrics' directory in this repository do.
As I understand, 'metrics' directory give us the function to measure accuracy about result of objection detection.
But, I have any idea that what the example of metrics computation command (with bazel) in Quick Start document do. Also, no idea about output console message means...
Could anyone give me a information what metrics directory do, process of working metrics directory, relationship open dataset with metrics directory, why this directory exist in this repository (I think there is no relationship open dataset with metrics evaluation), when and how this directory will be using with open dataset.
There is no deep learning model in this repository isn't it?
Is 'metrics' repository is using with ground truth file (waymo open dataset) and output file (using custom deep-learning model)?
Could you give any information about this directory?
Thanks.
Hello,
Do you use 11 score_cutoffs to calculate the mAP?
Is it consistent with how KITTI evaluates 3D object detection or are there differences?
Regards
Hi,
Do you guys have any tutorials or guides available for windows installation? I cannot seem to find anything and all pip packages seem to be for linux.
Cheers,
Hamid
This error comes from ' from waymo_open_dataset.utils import range_image_utils'
The version of tensorflow is 2.0.0
Full error message:
Traceback (most recent call last):
File "waymo_data_preprocess.py", line 12, in
from waymo_open_dataset.utils import range_image_utils
File "/home/shawn/.local/lib/python3.6/site-packages/waymo_open_dataset/utils/range_image_utils.py", line 59, in
pool_method=tf.unsorted_segment_max):
AttributeError: module 'tensorflow' has no attribute 'unsorted_segment_max'
Hope anyone can help. Thank you
I extracted out only the LiDAR label bounding box and visualized in Open3D GUI. It looks like as follow, but all the bboxes heading angle are verticle to their correct direction.

Thus, I add pi/2 to each heading, and it sames to be coorect, but I still don't know why.

Is the heading also in vehicle frame? or it is in sensor frame?
message Label {
// Upright box, zero pitch and roll.
message Box {
// Box coordinates in vehicle frame.
optional double center_x = 1;
optional double center_y = 2;
optional double center_z = 3;
// Dimensions of the box. length: dim x. width: dim y. height: dim z.
optional double length = 5;
optional double width = 4;
optional double height = 6;
// The heading of the bounding box (in radians). The heading is the angle
// required to rotate +x to the surface normal of the SDC front face.
optional double heading = 7;
Hi.
Now I am setting my local linux envirionment as same as Colab Waymo Open Dataset Tutorial.
When I type command 'pip install waymo-dataset' , error messages occurs

Could you help me please?
OS: Ubuntu 16.04
Tensorflow Version: 1.8.0 (Python-package CPU)
Anaconda Version: 4.6.2
Protobuf Version (libprotoc): 3.7.1
I am having issues trying to install the repo, following the tutorials/tutorial.ipynb script in the r1.0 branch. I get the following error when I try to run bazel build ... --show_progress_rate_limit=10.0:
WARNING: Ignoring JAVA_HOME, because it must point to a JDK, not a JRE.
WARNING: /home/kenny/.cache/bazel/_bazel_kenny/e25a28ddc954c6434533a57c92d5fe6c/external/local_config_tf/BUILD:1716:1: target 'libtensorflow_framework.so' is both a rule and a file; please choose another name for the rule
INFO: Analyzed 62 targets (57 packages loaded, 8197 targets configured).
INFO: Found 62 targets...
INFO: From Compiling waymo_open_dataset/protos/breakdown.pb.cc:
bazel-out/k8-opt/bin/waymo_open_dataset/protos/breakdown.pb.cc:103:13: warning: 'dynamic_init_dummy_waymo_5fopen_5fdataset_2fprotos_2fbreakdown_2eproto' defined but not used [-Wunused-variable]
static bool dynamic_init_dummy_waymo_5fopen_5fdataset_2fprotos_2fbreakdown_2eproto = []() { AddDescriptors_waymo_5fopen_5fdataset_2fprotos_2fbreakdown_2eproto(); return true; }();
^
INFO: From Compiling waymo_open_dataset/protos/metrics.pb.cc:
bazel-out/k8-opt/bin/waymo_open_dataset/protos/metrics.pb.cc:557:13: warning: 'dynamic_init_dummy_waymo_5fopen_5fdataset_2fprotos_2fmetrics_2eproto' defined but not used [-Wunused-variable]
static bool dynamic_init_dummy_waymo_5fopen_5fdataset_2fprotos_2fmetrics_2eproto = []() { AddDescriptors_waymo_5fopen_5fdataset_2fprotos_2fmetrics_2eproto(); return true; }();
^
INFO: From Compiling waymo_open_dataset/label.pb.cc:
bazel-out/k8-opt/bin/waymo_open_dataset/label.pb.cc:230:13: warning: 'dynamic_init_dummy_waymo_5fopen_5fdataset_2flabel_2eproto' defined but not used [-Wunused-variable]
static bool dynamic_init_dummy_waymo_5fopen_5fdataset_2flabel_2eproto = []() { AddDescriptors_waymo_5fopen_5fdataset_2flabel_2eproto(); return true; }();
^
ERROR: /mnt/linuxsec/datasets/waymo-open-dataset/waymo-od/waymo_open_dataset/metrics/ops/BUILD:10:1: C++ compilation of rule '//waymo_open_dataset/metrics/ops:utils' failed (Exit 1) gcc failed: error executing command /usr/bin/gcc -U_FORTIFY_SOURCE -fstack-protector -Wall -Wunused-but-set-parameter -Wno-free-nonheap-object -fno-omit-frame-pointer -g0 -O2 '-D_FORTIFY_SOURCE=1' -DNDEBUG -ffunction-sections ... (remaining 53 argument(s) skipped)
Use --sandbox_debug to see verbose messages from the sandbox
In file included from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/variant.h:26:0,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/allocator.h:26,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.h:20,
from ./waymo_open_dataset/metrics/ops/utils.h:23,
from waymo_open_dataset/metrics/ops/utils.cc:16:
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.pb.h:17:2: error: #error This file was generated by an older version of protoc which is
#error This file was generated by an older version of protoc which is
^
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.pb.h:18:2: error: #error incompatible with your Protocol Buffer headers. Please
#error incompatible with your Protocol Buffer headers. Please
^
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.pb.h:19:2: error: #error regenerate this file with a newer version of protoc.
#error regenerate this file with a newer version of protoc.
^
In file included from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.pb.h:32:0,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/variant.h:26,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/allocator.h:26,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.h:20,
from ./waymo_open_dataset/metrics/ops/utils.h:23,
from waymo_open_dataset/metrics/ops/utils.cc:16:
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/resource_handle.pb.h:17:2: error: #error This file was generated by an older version of protoc which is
#error This file was generated by an older version of protoc which is
^
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/resource_handle.pb.h:18:2: error: #error incompatible with your Protocol Buffer headers. Please
#error incompatible with your Protocol Buffer headers. Please
^
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/resource_handle.pb.h:19:2: error: #error regenerate this file with a newer version of protoc.
#error regenerate this file with a newer version of protoc.
^
In file included from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.pb.h:33:0,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/variant.h:26,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/allocator.h:26,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.h:20,
from ./waymo_open_dataset/metrics/ops/utils.h:23,
from waymo_open_dataset/metrics/ops/utils.cc:16:
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor_shape.pb.h:17:2: error: #error This file was generated by an older version of protoc which is
#error This file was generated by an older version of protoc which is
^
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor_shape.pb.h:18:2: error: #error incompatible with your Protocol Buffer headers. Please
#error incompatible with your Protocol Buffer headers. Please
^
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor_shape.pb.h:19:2: error: #error regenerate this file with a newer version of protoc.
#error regenerate this file with a newer version of protoc.
^
In file included from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.pb.h:34:0,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/variant.h:26,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/allocator.h:26,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.h:20,
from ./waymo_open_dataset/metrics/ops/utils.h:23,
from waymo_open_dataset/metrics/ops/utils.cc:16:
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/types.pb.h:17:2: error: #error This file was generated by an older version of protoc which is
#error This file was generated by an older version of protoc which is
^
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/types.pb.h:18:2: error: #error incompatible with your Protocol Buffer headers. Please
#error incompatible with your Protocol Buffer headers. Please
^
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/types.pb.h:19:2: error: #error regenerate this file with a newer version of protoc.
#error regenerate this file with a newer version of protoc.
^
In file included from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/lib/core/status.h:23:0,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/variant.h:29,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/allocator.h:26,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.h:20,
from ./waymo_open_dataset/metrics/ops/utils.h:23,
from waymo_open_dataset/metrics/ops/utils.cc:16:
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/lib/core/error_codes.pb.h:17:2: error: #error This file was generated by an older version of protoc which is
#error This file was generated by an older version of protoc which is
^
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/lib/core/error_codes.pb.h:18:2: error: #error incompatible with your Protocol Buffer headers. Please
#error incompatible with your Protocol Buffer headers. Please
^
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/lib/core/error_codes.pb.h:19:2: error: #error regenerate this file with a newer version of protoc.
#error regenerate this file with a newer version of protoc.
^
In file included from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.pb.h:32:0,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/variant.h:26,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/allocator.h:26,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.h:20,
from ./waymo_open_dataset/metrics/ops/utils.h:23,
from waymo_open_dataset/metrics/ops/utils.cc:16:
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/resource_handle.pb.h:105:10: error: 'PROTOBUF_CONSTEXPR' does not name a type
static PROTOBUF_CONSTEXPR int const kIndexInFileMessages =
^
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/resource_handle.pb.h:135:30: error: 'google::protobuf::uint8* tensorflow::ResourceHandleProto::InternalSerializeWithCachedSizesToArray(bool, google::protobuf::uint8*) const' marked 'final', but is not virtual
::google::protobuf::uint8* InternalSerializeWithCachedSizesToArray(
^
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/resource_handle.pb.h: In member function 'void tensorflow::ResourceHandleProto::clear_hash_code()':
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/resource_handle.pb.h:515:34: error: 'GOOGLE_ULONGLONG' was not declared in this scope
hash_code_ = GOOGLE_ULONGLONG(0);
^
In file included from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.pb.h:33:0,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/variant.h:26,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/allocator.h:26,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.h:20,
from ./waymo_open_dataset/metrics/ops/utils.h:23,
from waymo_open_dataset/metrics/ops/utils.cc:16:
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor_shape.pb.h: At global scope:
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor_shape.pb.h:112:10: error: 'PROTOBUF_CONSTEXPR' does not name a type
static PROTOBUF_CONSTEXPR int const kIndexInFileMessages =
^
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor_shape.pb.h:142:30: error: 'google::protobuf::uint8* tensorflow::TensorShapeProto_Dim::InternalSerializeWithCachedSizesToArray(bool, google::protobuf::uint8*) const' marked 'final', but is not virtual
::google::protobuf::uint8* InternalSerializeWithCachedSizesToArray(
^
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor_shape.pb.h:254:10: error: 'PROTOBUF_CONSTEXPR' does not name a type
static PROTOBUF_CONSTEXPR int const kIndexInFileMessages =
^
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor_shape.pb.h:284:30: error: 'google::protobuf::uint8* tensorflow::TensorShapeProto::InternalSerializeWithCachedSizesToArray(bool, google::protobuf::uint8*) const' marked 'final', but is not virtual
::google::protobuf::uint8* InternalSerializeWithCachedSizesToArray(
^
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor_shape.pb.h: In member function 'void tensorflow::TensorShapeProto_Dim::clear_size()':
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor_shape.pb.h:358:28: error: 'GOOGLE_LONGLONG' was not declared in this scope
size_ = GOOGLE_LONGLONG(0);
^
In file included from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.pb.h:34:0,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/variant.h:26,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/allocator.h:26,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.h:20,
from ./waymo_open_dataset/metrics/ops/utils.h:23,
from waymo_open_dataset/metrics/ops/utils.cc:16:
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/types.pb.h: At global scope:
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/types.pb.h:140:101: error: expected class-name before '{' token
template <> struct is_proto_enum< ::tensorflow::DataType> : ::google::protobuf::internal::true_type {};
^
In file included from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/variant.h:26:0,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/allocator.h:26,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.h:20,
from ./waymo_open_dataset/metrics/ops/utils.h:23,
from waymo_open_dataset/metrics/ops/utils.cc:16:
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.pb.h:112:10: error: 'PROTOBUF_CONSTEXPR' does not name a type
static PROTOBUF_CONSTEXPR int const kIndexInFileMessages =
^
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.pb.h:142:30: error: 'google::protobuf::uint8* tensorflow::TensorProto::InternalSerializeWithCachedSizesToArray(bool, google::protobuf::uint8*) const' marked 'final', but is not virtual
::google::protobuf::uint8* InternalSerializeWithCachedSizesToArray(
^
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.pb.h:463:10: error: 'PROTOBUF_CONSTEXPR' does not name a type
static PROTOBUF_CONSTEXPR int const kIndexInFileMessages =
^
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.pb.h:493:30: error: 'google::protobuf::uint8* tensorflow::VariantTensorDataProto::InternalSerializeWithCachedSizesToArray(bool, google::protobuf::uint8*) const' marked 'final', but is not virtual
::google::protobuf::uint8* InternalSerializeWithCachedSizesToArray(
^
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.pb.h: In member function 'tensorflow::TensorShapeProto* tensorflow::TensorProto::release_tensor_shape()':
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.pb.h:633:71: error: no matching function for call to 'DuplicateIfNonNull(tensorflow::TensorShapeProto*&, NULL)'
temp = ::google::protobuf::internal::DuplicateIfNonNull(temp, NULL);
^
In file included from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.pb.h:26:0,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/variant.h:26,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/allocator.h:26,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.h:20,
from ./waymo_open_dataset/metrics/ops/utils.h:23,
from waymo_open_dataset/metrics/ops/utils.cc:16:
external/com_google_protobuf/src/google/protobuf/generated_message_util.h:139:4: note: candidate: template<class T> T* google::protobuf::internal::DuplicateIfNonNull(T*)
T* DuplicateIfNonNull(T* message) {
^
external/com_google_protobuf/src/google/protobuf/generated_message_util.h:139:4: note: template argument deduction/substitution failed:
In file included from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/variant.h:26:0,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/allocator.h:26,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.h:20,
from ./waymo_open_dataset/metrics/ops/utils.h:23,
from waymo_open_dataset/metrics/ops/utils.cc:16:
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.pb.h:633:71: note: candidate expects 1 argument, 2 provided
temp = ::google::protobuf::internal::DuplicateIfNonNull(temp, NULL);
^
In file included from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/lib/core/status.h:23:0,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/variant.h:29,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/allocator.h:26,
from bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/framework/tensor.h:20,
from ./waymo_open_dataset/metrics/ops/utils.h:23,
from waymo_open_dataset/metrics/ops/utils.cc:16:
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/lib/core/error_codes.pb.h: At global scope:
bazel-out/k8-opt/bin/external/local_config_tf/include/tensorflow/core/lib/core/error_codes.pb.h:115:104: error: expected class-name before '{' token
template <> struct is_proto_enum< ::tensorflow::error::Code> : ::google::protobuf::internal::true_type {};
^
waymo_open_dataset/metrics/ops/utils.cc: In function 'int waymo::open_dataset::GetDesiredBoxDOF(waymo::open_dataset::Label_Box::Type)':
waymo_open_dataset/metrics/ops/utils.cc:91:1: warning: control reaches end of non-void function [-Wreturn-type]
}
^
Any idea on what this build script is trying to depend on, or if I need to install further dependencies?
Hi,
After exploring the data, I found out that you have also bounding boxes annotation for objects which are occluded by other objects. Do you have any information telling how much the object is occluded?
Can we infer something from the field:
optional DifficultyLevel detection_difficulty_level = 5;
Thanks,
How do you extract object labels from the 2D/3D data? I wonder if there is a demo code for it. Thx.
Hi.
I want to evaluate with your code "compute_detection_metrics_main.cc", but have a problem.
I tried to test "Fake" ones on Quick Start guid line (below command) and it worked well.
bazel-bin/waymo_open_dataset/metrics/tools/compute_detection_metrics_main waymo_open_dataset/metrics/tools/fake_predictions.bin waymo_open_dataset/metrics/tools/fake_ground_truths.bin
Now i want to test detection metrics on my own results tested by waymo open datset validation set (TYPE_2D).
But i confused with results file format.
I found format is following "waymo::open_dataset::Objects proto." , but feel difficulty on making pd_file and gt_file.
SO, may i asking the example of pd_file or gt_file?
for example, like,
"image_name center_x center_y length height score"
Thank you.
When I run "from waymo_open_dataset import dataset_pb2 as open_dataset", there would report an error "ImportError: cannot import name 'dataset_pb2'".
What is the reason for this? What is the 'dataset_pb2'?
Looking forward to your reply!
Hi, can you explain how to tie 2d and 3d boxes?
Where can I find the information of the 2D bounding boxes in the scene?
Hello,
Is the ChauffeurNet dataset available? Is it different from this dataset? It has to have map data I think.
Thank you
Hi,
I am trying to visualize camera projection on other images by changing images index as follows
mask = tf.equal(cp_points_all_tensor[..., 0], images[3].name)
Here's a screenshot of the output

Is this the correct way to do it? Does the screenshot look correct?
Normally they are either [0,1] or [0,255] but I found the intensity given could be up to 4000?
test
The official tutorial uses eager mode: https://colab.research.google.com/github/waymo-research/waymo-open-dataset/blob/master/tutorial/tutorial.ipynb
But it doesn't actually make clear that eager mode is unfortunately required. Attempting to use the code in this python package *without eager mode can result in crashes, e.g.:
def parse_range_image_and_camera_projection(frame):
...
range_image_top_pose = None
for laser in frame.lasers:
if len(laser.ri_return1.range_image_compressed) > 0: # pylint: disable=g-explicit-length-test
range_image_str_tensor = tf.decode_compressed(
laser.ri_return1.range_image_compressed, 'ZLIB')
ri = dataset_pb2.MatrixFloat()
> ri.ParseFromString(bytearray(range_image_str_tensor.numpy()))
E AttributeError: 'Tensor' object has no attribute 'numpy'
This is very sad, because a ton of Tensorflow code (e.g. that in tensorflow/models, tensorflow/tpu, other 3rd party repos, etc etc) would need major changes in order to work with TF Eager execution. While Eager is the default for TF 2.0, public support for TPUs in TF 2.0 is not yet complete ( tensorflow/tensorflow#24412 ).
In the interest of having a library that is as composable as those written for other datasets (e.g. NuScenes, Lyft Level 5, and Argoverse), this is a request for waymo-open-dataset to follow Tensorflow's own recommendation that code support both eager and graph execution. Moreover, there is a large set of functionality in this repo that does not require Tensorflow at all; this is a further request to isolate away the bits that actually require Tensorflow (e.g. the C++ metrics).
In the interim, users can use a py_func workaround (see below).
This is a demo of getting all lidar points, fused, using waymo-open-dataset code confined to its own tf.Session:
def get_fused_cloud_in_ego(waymo_frame):
import tensorflow as tf
import tensorflow.contrib.eager as tfe
def get_all_points(wf_str):
assert tf.executing_eagerly()
from waymo_open_dataset import dataset_pb2 as open_dataset
wf = open_dataset.Frame()
wf.ParseFromString(wf_str.numpy())
from waymo_open_dataset.utils import frame_utils
range_images, camera_projections, range_image_top_pose = (
frame_utils.parse_range_image_and_camera_projection(wf))
# Waymo provides two returns for every lidar beam; we have to
# fuse them manually
points, cp_points = frame_utils.convert_range_image_to_point_cloud(
wf,
range_images,
camera_projections,
range_image_top_pose)
points_ri2, cp_points_ri2 = frame_utils.convert_range_image_to_point_cloud(
wf,
range_images,
camera_projections,
range_image_top_pose,
ri_index=1)
# 3d points in vehicle frame.
points_all = np.concatenate(points, axis=0)
points_all_ri2 = np.concatenate(points_ri2, axis=0)
all_points = np.concatenate((points_all, points_all_ri2), axis=0)
return all_points
# Run the `get_all_points()` helper in its own session to confine the Eager mode scope
assert not tf.executing_eagerly()
with tf.Session() as sess:
wf = tf.placeholder(dtype=tf.string)
pf = tfe.py_func(get_all_points, [wf], tf.float32)
all_points = sess.run(pf, feed_dict={wf: waymo_frame.SerializeToString()})
return all_points
In the website, it says that two range images are provided for each lidar, one for each of the two strongest returns. Why there are multiple range images in one frame? Is there any relationship between them?
message Laser {
optional LaserName.Name name = 1;
optional RangeImage ri_return1 = 2;
optional RangeImage ri_return2 = 3;
}
following the Quick Start Guide I can't test or build anything... see Screenshot
more info:
$ python
Python 3.6.5 (default, May 28 2018, 14:40:28)
[GCC 4.9.2] on linux
Type "help", "copyright", "credits" or "license" for more information.
import tensorflow as tf
print(tf.version)
1.8.0
Hi,
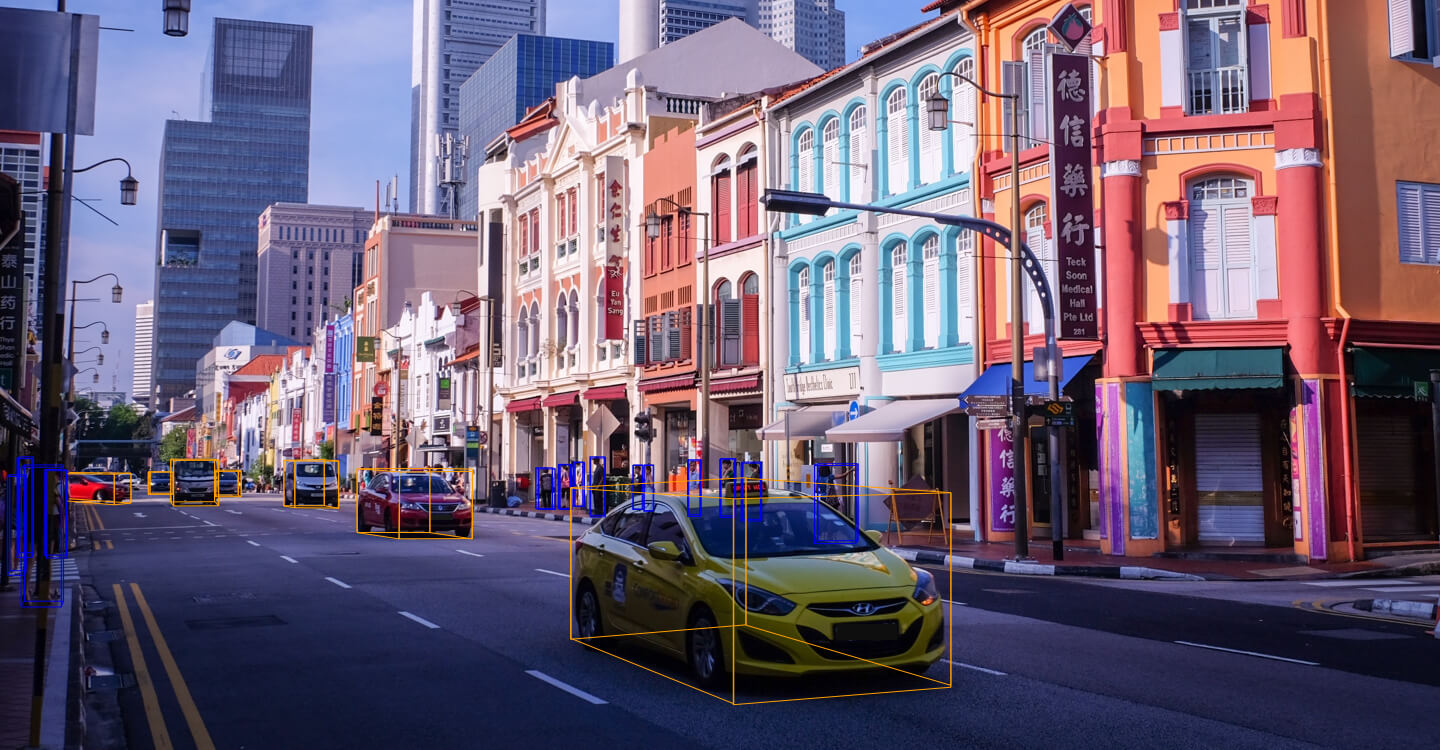
I'm trying to draw 3d cuboid on 2d camera images, so the all corners could appear in the camera images. I can check there is projected_lidar_labels which is 2d bounding boxes for cuboids, but this is not I want to draw. For example, https://www.nuscenes.org/public/images/road.jpg is kind of projected image I would like to make.
I tried to use CameraCalibration and laser_labels in Context to draw cuboids, but I still couldn't figure it out. It seems like cuboids don't align well on objects in camera images.
Thanks.
I have obtained the frames and the 2D coordinates of pedestrians in each frame, but how do I know if the pedestrians appearing in different video frames are the same person?
I have download the dataset, but the dataset is ".tfrecord", how to extract images? I cannot do it even with the tutorial.
Thanks for your help.
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.
{kind=link}
{kind=link}