
This tool is based on the OnShape API to retrieve informations from an assembly and build an SDF or URDF model suitable for physics simulation.
Converting OnShape assembly to robot definition (SDF or URDF) through OnShape API
License: MIT License
This tool is based on the OnShape API to retrieve informations from an assembly and build an SDF or URDF model suitable for physics simulation.





























































































































Explain what it is possible to do with simulation.py, that is basically a wrapper around pyBullet
If an OnShape dof is fastened, handle it as a fixed joint
I'm getting this error:
Unable to find assembly in this document
I think it's getting to the page but for some reason, it's not finding the assembly.
Does anyone have any suggestions that might give e a workaround of this? Thanks!
Need to follow up subAssemblies to find the exact matching part (cf OnShape ticket exchanges)
Since onShape is a very expensive and paid tool not most of us have access to it. Can this extension to be generalised for CAD files without OnShape
Maybe something like Solidworks? I know there is an extension there to export for UDSF but that is not even similiar to what this repo does. ( Automatically finding tree structure etc)
Instead of using "robot" as a mandatory file name for the generated .urdf or .sdf file, the name could be set in the config, and keep "robot" as a default value.
hey i have tried it with google colab but its show something like this
Checking OpenSCAD presence...
Can't run openscad -v, disabling OpenSCAD support
TIP: consider installing openscad:
sudo add-apt-repository ppa:openscad/releases
sudo apt-get update
sudo apt-get install openscad
Checking MeshLab presence...
Retrieving workspace ID ...
below image shows my document in onshape. All the fastened and revolute are working fine, and i am also able to move my arm in assembly.

And this the photo of converting process. It has detected all the dofs but not writing them in urdf.

Though some of part of robot are not imported successfully, and is shows error like this "Contains faulty topology", which you can see in below image.

But this error containing part are being imported in porject folder and in urdf file as well. And also i am able to run this part in bullet, shown below.

That's why i am not able to get, where am i making mistake? So it would be really great if anybody can help me in this problem.
Thank You..
Adding mate connectors to it with name link_something to tag it
Ping @SammyRamone , I don't know the exact purpose of packageName (i expect it is about defining the path of your STLs?), but isn't it a bug that it is not also appended in the STLs files that are uses for collisions (assuming you don't use pure shapes) ?
We could allow user to set joints properties on config.json
However, we should handle the fact that multiple types of joints can be used, with different properties (maybe another issue)
The signs of the motors should be manageable somehow, maybe at least providing a way for the user to invert joint axis orientations in URDF
Currently using the "mergeSTLs" option will only merge the visual stls in an URDF. The collision will still consist out of multiple stl files.
Is this intended behaviour?
If yes please document it better in the documentation by stating that only visual stls are merged.
Otherwise, I did a small hack to make it work (which should not be merged upstream due to bad code quality): bit-bots@390ea00
It works but for my model I had to deactivate collision with parents (using the URDF_USE_SELF_COLLISION_EXCLUDE_ALL_PARENTS flag) since it would lead to some self collisions otherwise.
Hello, thank you for making good tool.
I almost completed applying your program to the my own robot.


However, the problem that only two of the four wheels are displayed continued. Thus, I need some help for solving that problem.

Curiously, I confirmed that the first two of the revolulate mate, named dof_wheel, is displayed correctly. This is confirmed by a phenomenon that occurred in the same manner even when the order is changed.
Maybe I'd be grateful if you give me some advice for this phenomenon.
P.S.
Here is my Onshape robot model link : https://cad.onshape.com/documents/242e5d0f2f1cbff393c8e507/w/d559dc996c8b8bc22d12a621/e/61eb8c1b97972fad8186460d
Thank you,
From Dohyeong Kim
So far pure shapes from OpenSCAD works only if center is set to true on the shape
Instead of adding all STLs one by one in the <visual> section, maybe they could be merged
This only affects visual
How could we keep the color then?
Using obj?
Simplifications?
Hello,
Last year in December I generated correctly the urdf from my onshape model which contained faulty topology (although it looks good visually). The newest version of onshape-to-robot that I tried a few days ago shows a problem: WARNING: part X has no dynamics (maybe it is a surface). It creates the urdf file but without linking to an stl model. I generated again a correct urdf with v.0.3.4 so definitely something changed between the newest and that version. I am not sure if this behaviour was desired but at least it prevents me from using the newest version because I cannot change the imported model in onshape and I cannot find what causes the faulty topology.
Good point: MuJoCo seems to outperform other physics engine
Bad point: license is paid, so less reproductibility
But supporting MJCF (MuJoCo XML description format) would be feasible
@SammyRamone : do you use MuJoCo?
Dear Onshape-Team,
I had a problem with your product.
In our project, we want to build a constrained model for machine learning.
To solve this, I copied the main assembly and adjusted the joint limits.
When exporting the assembly with onshape-to-robot, we experienced changes in the origins of the joint tag.
This lead to an erroneous behaviour in our simulation.
Specifically the <origin> tag within the <joint> tag changes.
Is this intended?
If yes, how can I avoid this behaviour?
If no, will you resolve this or is there a known work around?
Kind regards,
Thomas
Seems like the "load_robot.py" has a problem with gear ratio (throws error in line 140). Seems like an easy fix to add a suppression, but i am not really confident with the code. Maybe it is possible to fix
Composite Parts are a relatively new addition to OnShape and are super useful to import standard parts in your robot. They can be assigned a material and a mass (for "closed composite") or behave as assemblies (therefore weighting as the sum of the components (for "open composite").
To allow composite parts to behave as "normal parts" just a single line needs changing:
add 'includeNonSolids' to the list of the queries
return self._api.request('get', '/api/assemblies/d/'+did+'/'+type+'/'+wid+'/e/'+eid, query={'includeMateFeatures': 'true', 'includeNonSolids': 'true'}).json()
We could import the limits from Cylindrical mates into the URDF/SDF file
Looks like the joint <pose> is not read at all by PyBullet itself
$ ./onshape-to-robot.py robots/myrobot
Traceback (most recent call last):
File "./onshape-to-robot.py", line 4, in <module>
from robot_description import RobotURDF, RobotSDF
File "/home/nvidia/onshape-to-robot/robot_description.py", line 5, in <module>
import stl_combine
File "/home/nvidia/onshape-to-robot/stl_combine.py", line 5, in <module>
import stl
File "/home/nvidia/.local/lib/python2.7/site-packages/stl/__init__.py", line 2, in <module>
import stl.ascii
ImportError: No module named ascii
$ python3 -m onshape-to-robot.py robots/myrobot
Traceback (most recent call last):
File "/usr/lib/python3.6/runpy.py", line 183, in _run_module_as_main
mod_name, mod_spec, code = _get_module_details(mod_name, _Error)
File "/usr/lib/python3.6/runpy.py", line 109, in _get_module_details
__import__(pkg_name)
File "/home/nvidia/onshape-to-robot/onshape-to-robot.py", line 4, in <module>
from robot_description import RobotURDF, RobotSDF
File "/home/nvidia/onshape-to-robot/robot_description.py", line 5, in <module>
import stl_combine
File "/home/nvidia/onshape-to-robot/stl_combine.py", line 7, in <module>
from stl import mesh
File "/home/nvidia/.local/lib/python3.6/site-packages/stl/mesh.py", line 4, in <module>
class Mesh(stl.BaseStl):
AttributeError: module 'stl' has no attribute 'BaseStl'
``
Hello,
i can not find a possibility to onshape-to-robot on a specified branch. The script seems to just take the last one active.
Can you add the Workspace Id in the Config.json to solve this ?
Currently, using file://, is it the good way?
So far, the inertia computation is aggregated in one link in SDF mode, the computations should be checked
I implemented additional config values to specify joint damping and friction for URDFs on my fork (see bit-bots@ef9db6e). The implementation is basically the same as for the joint velocity and torque.
Are you interested in having this upstream? If yes, I can do a PR or you can just copy the few lines of code.
So that the config.json could be committed safely for eg.
Hi there,
Currently, the API supports conversion from the native format to the SDF file (supported by Gazebo classic). I am looking for an API that would change this to the SDF files supported by the ignition gazebo. Any idea on how to do that?
Note: The SDF files supported by the Gazebo(classic) and Gazebo ignition have a significant difference. Please refer this.
Thanks
Just a small thing. When loading the URDF into bullet it does not use the provided Inertias but recomputes them:
by default, Bullet recomputed the inertia tensor based on mass and volume of the collision shape. If you can provide more accurate inertia tensor, use this flag.
You need to set the URDF_USE_INERTIA_FROM_FILE flag to prevent this here
onshape-to-robot/onshape_to_robot/simulation.py
Lines 70 to 72 in baef494
I think it would be good to change this in the simulation, as people may get confused why the model is behaving incorrectly after adding good inertia values in the config using the "dynamics" parameter.
I'm trying to download the cad into urdf. It seems like there is no occurrences from onshape.
Can it be a problem with the CAD?
Thanks
Hello, I am trying to use an onshape model with ROS. I was able to follow the directions and make an urdf for the robot but now I am trying to get an sdf, but I get the following error:
Looks like PyBullet is not handling multiple colors in one link, issue opened:
bulletphysics/bullet3#2650
The code is very redundant and can be refactored
When I use the export tool, it seems to ignore the configuration specification in the config.json file:
Eg:
"documentId": "abcdefghi123456789", "outputFormat": "urdf", "assemblyName": "myrobot", "versionId": "abcdefghi123456789", "configuration: "extra long legs",
no matter what I put, the default configuration is always exported. Is there something I am missing?
Additionally - some of my links in the top level assembly are sub-assemblies. Is there any way to specify configurations for these sub-assemblies?
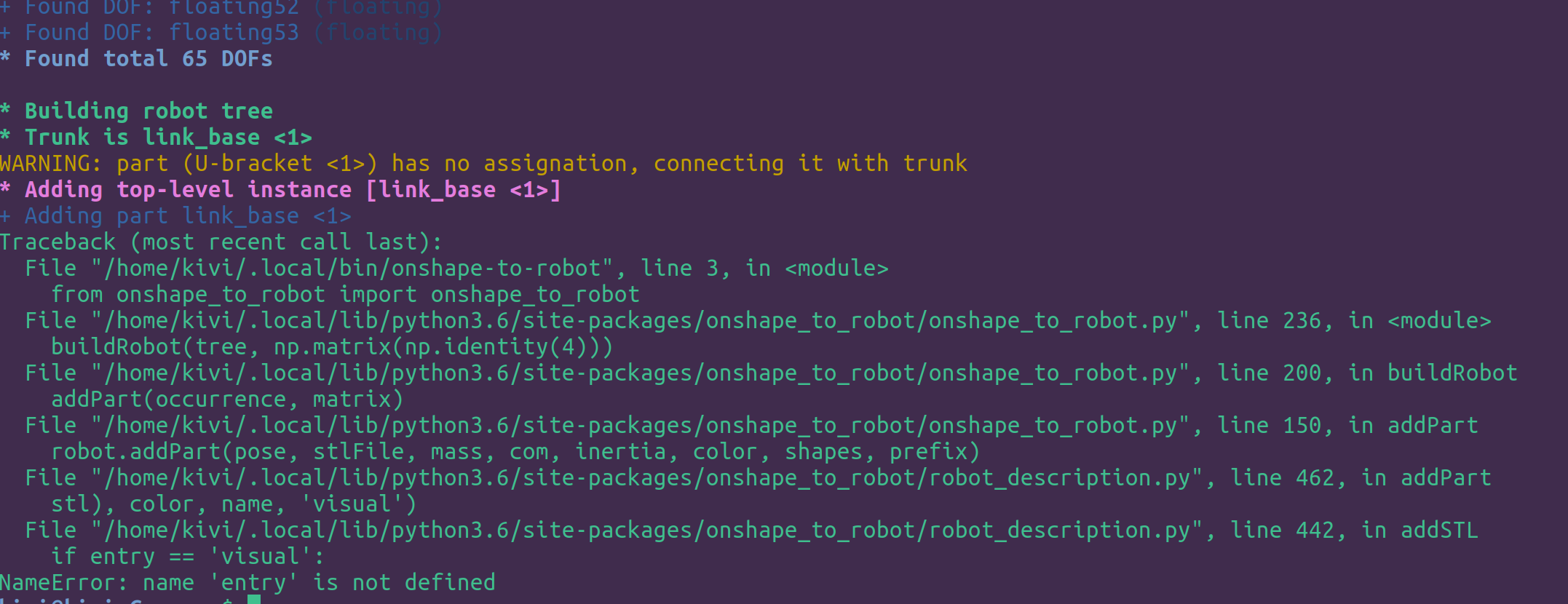
Got this error while reading Limits for revolute joint
Traceback (most recent call last):
File "/home/onshape-to-robot/onshape-to-robot", line 3, in
from onshape_to_robot import onshape_to_robot
File "/home/onshape-to-robot/onshape_to_robot/onshape_to_robot.py", line 15, in
from .load_robot import
File "/home/onshape-to-robot/onshape_to_robot/load_robot.py", line 166, in
limits = getLimits(jointType, data['name'])
File "/home/onshape-to-robot/onshape_to_robot/features.py", line 84, in getLimits
minimum = readParameterValue(parameter)
File "/home/onshape-to-robot/onshape_to_robot/features.py", line 61, in readParameterValue
if value['message']['booleanValue'] == parameterValue:
KeyError: 'booleanValue'
Do you guys know any workaround?
Hi!
I'm trying to use onshape-to-robot now and facing the following issue:
I've tried to clear cache, delete all files, update timestamp for the config json - nothing helps.
Here is the current state of my assembly:

And here is what I find in stl file:

Can it be a glitch of the onshape's API?
PS: It looks like onshape's configuration variables are not evaluated properly.
Br, Alex
Hello
I am trying to create a urdf file from an onshape model of a robot manipulator arm, and I am getting the following error:
Checking OpenSCAD presence...
Checking MeshLab presence...
Retrieving workspace ID ...
Retrieving assembly "Bravo_7" with id e7806a8b6e8ca46848b0ad73
Getting assembly features, scanning for DOFs...
Found total 6 DOFs
Building robot tree
Trunk is Base <1>
Adding top-level instance [Base <1>]
<link rel="stylesheet" type="text/css" href="/css/jquery-ui/jquery-ui-1.10.4.custom.css" />
<link rel="stylesheet" type="text/css" href="/css/jquery.contextMenu.css" />
<link rel="stylesheet" type="text/css" href="/css/glyphicons.css" />
<link rel="stylesheet" type="text/css" href="/css/demoserver-bootstrap.css" />
<link rel="stylesheet" type="text/css" href="/css/jquery.nouislider.css" />
<link rel="stylesheet" type="text/css" href="/css/colorpicker-themes.css" />
<link rel="stylesheet" href="/css/bootstrap/bootstrap.css"/>
<link rel='stylesheet' type='text/css' href='/css/fonts.css' />
<link href="/css/newton.css" rel="stylesheet">
<script src="/js/runtime.31d2b0b55f004549b961.js"></script>
<script src="/js/vendor-bundle.31d2b0b55f004549b961.js"></script>
<script src="/js/webpack-vendor.31d2b0b55f004549b961.js"></script>
<script src="/js/woolsthorpe.31d2b0b55f004549b961.js"></script>
<script src="/css/newton.31d2b0b55f004549b961.js"></script>
<script type="text/javascript" src="https://js.stripe.com/v2/" async></script>
<script type="text/javascript" src="https://www.zuora.com/apps/Hosted/lite2/js/HPM2Security.js" async></script>
I tried to isolate the error and I believe it has something to do with Link2 of my model, but I am not sure what can the error with this part of the robot be. Can somebody explain me what does the html part of the error means? because a lot of the text does not make any sense.
Here is the link to my onshape document:
This is the isolated link of the arm that I believe is causing the problem:
Thank you in advance
Looks like there is some limits in URDFs loading
This is the error we received when running the code. Trying to figure out what we need to troubleshoot to resolve this. Any help provided is appreciated. Thanks!
(env) ubuntu@ubuntu:~/onshape-to-robot$ ./onshape-to-robot.py robots/swervedrive
Hello! I've been trying to use this useful program but I seem to be having trouble actually retrieving my OnShape Workspace. I have followed the documentation and created a new API key on OnShape of which I've put into my ~/.bashrc and sourced. I have deleted and created multiple keys but I always end up with the same result:
$ onshape-to-robot onshape-to-robot-examples/2wheels/
* Checking OpenSCAD presence...
* Checking MeshLab presence...
* Retrieving workspace ID ...
https://cad.onshape.com/api/documents/862948a6ea6d38343e1d3272?
! ERROR (403) while using OnShape API
In the example config.json, "mergeSTLs" and "simplifySTLs" are set to "false" whereas they can be only “no”, “visual”, “collision” or “all”.
It is possible to combine and simplify STLs, mainly to lighten the output robot description, but also as workaround for #16
However, this should be possible to also use those light STL files for collisions tags
From design point of view, that would imply changing the way the robot parts are imported in the current script
Is it possible in URDF/SDF?
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.